20
21
80
404
Accelerator
Gyroscope
DMP
Magnetometer
4
8
16
32
SCL传送时钟信号
SDA传送数据信号
SDA和SCL数据线均通过上拉电阻连接到VCC
SDA和SCL数据线均通过下拉电阻连接到GND
初始化SPI接口
设置数据在总线上的传送方式
设置数据在总线上的传送时钟频率
设置时钟模式
SDA
MOSI
SCLK
SS
regedit
msconfig
ipconfig
ping
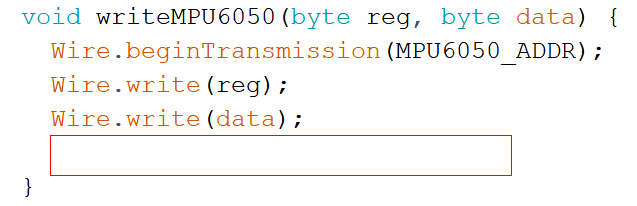
Wire.begin()
Wire.write()
Wire.endTransmission()
Wire.requestFrom()
SDA为低电平,SCL为高电平
SDA为低电平,SCL为低电平
SDA为高电平,SCL为低电平
SDA为高电平,SCL为高电平
网络接口层
传输层
网络层
应用层
WiFi.softAP()
WiFi.begin()
WiFi.softAPIP()
WiFi.localAP()
distanceToGO()
runSpeed()
moveTo()
move()
Wire.read()
Wire.write()
Wire.endTransmission()
Wire.requestFrom()
同步、全双工通信协议
同步、单工通信协议
异步、全双工通信协议
异步、单工通信协议
STA模式
AP模式
服务器模式
响应模式
步进电机转动通过脉冲信号控制
步进电机转动的速度与脉冲频率成正比
步进电机一般采用开环控制
步进电机运转时,会产生误差累计
加速度量程越大,返回的测量值精度越高。
通过加速度不能解析出姿态角。
加速度的返回值是16bit的无符号数。
加速度的量程可以根据需求设定。
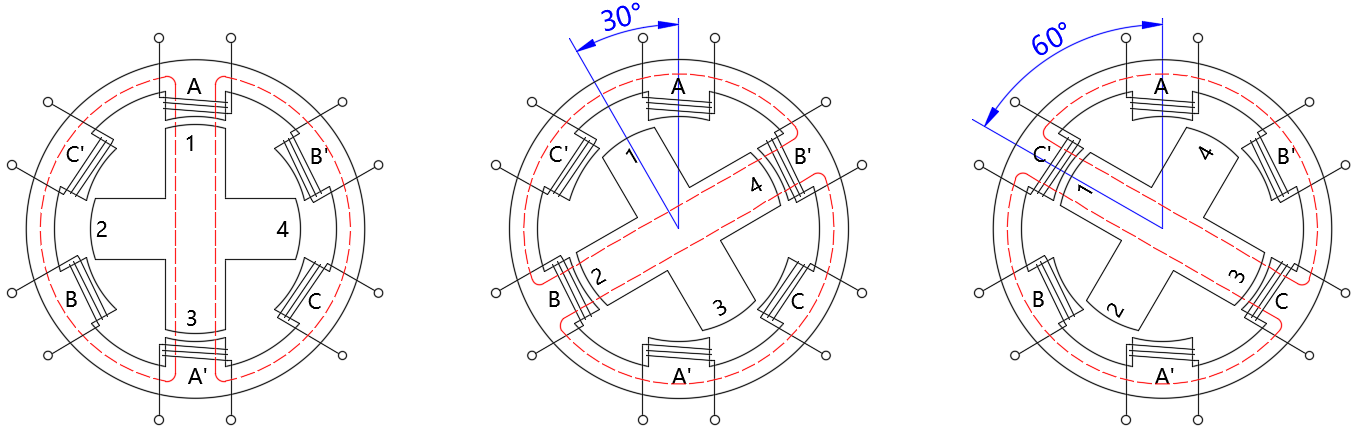
15度
30度
45度
60度
ESP32主控板
MPU6050姿态传感器
ESP32主控板和MPU6050姿态传感器按需发起
ESP32主控板和MPU6050姿态传感器同时发起
TCP/IP协议是一系列协议家族的统称;
TCP/IP协议包含了TCP协议和IP协议;
GET
PUT
P控制
I控制
定子
转子
SPI是异步通信
SPI是全双工通信
发表评论 取消回复