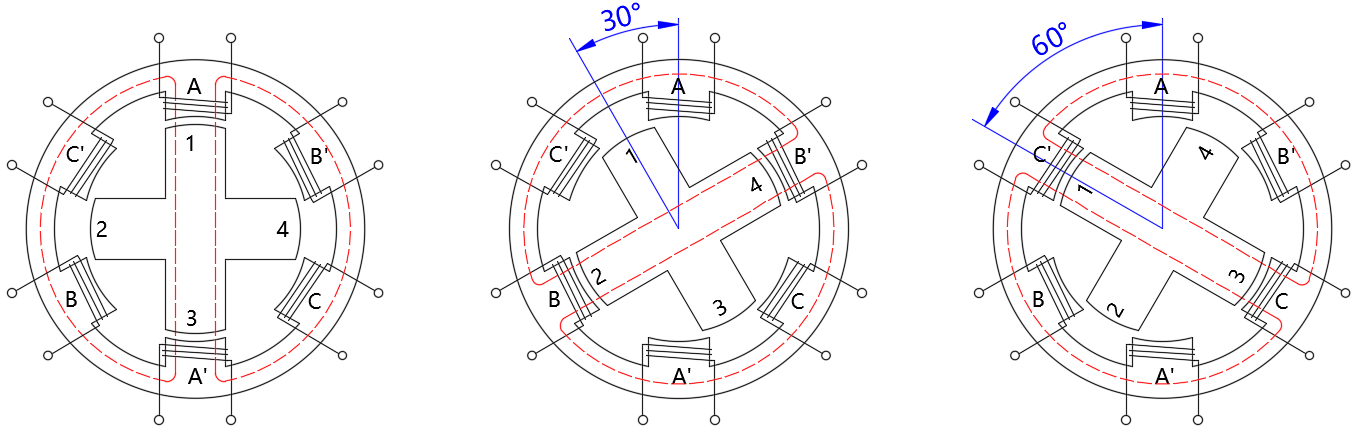
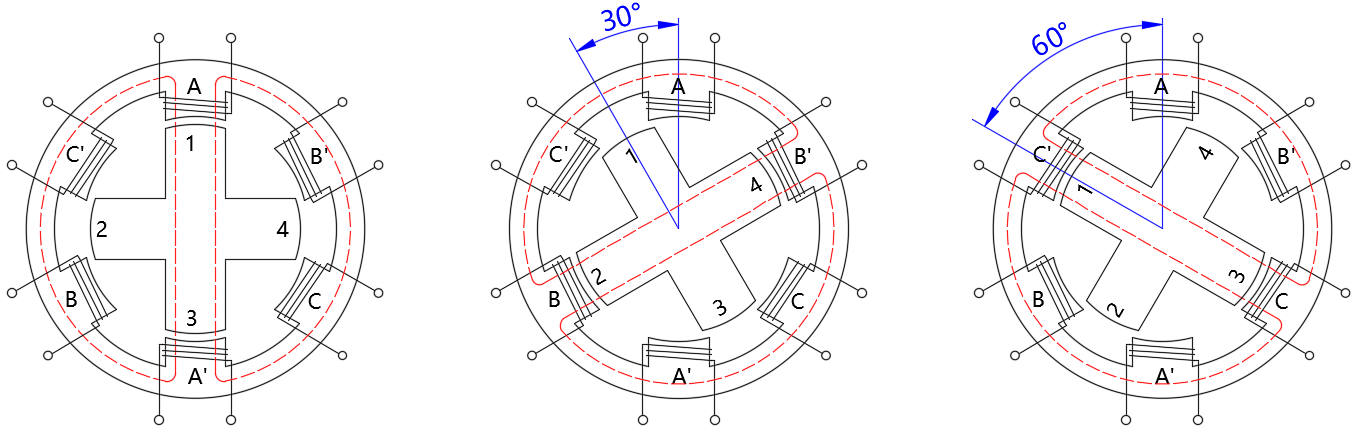
第 1 题 单选题
A.
15度
B.
30度
C.
45度
D.
60度
第 2 题 单选题
A.
高电平
B.
低电平
C.
上升沿
D.
下降沿
第 3 题 单选题
A.
三相单双三拍
B.
三相单三拍
C.
三相双三拍
D.
三相单双六拍
第 4 题 单选题
A.
步进电机的角位移量和电脉冲数成正比。
B.
通过改变电脉冲的频率,可实现步进电机速度的调节。
C.
在不丢步的情况下,步进电机的误差会累积。
D.
步进电机难以运转到较高的转速。
第 5 题 单选题
A.
16
B.
32
C.
64
D.
128
第 6 题 单选题
A.
8位
B.
16位
C.
32位
D.
64位
第 7 题 单选题
A.
主设备向从设备发送请求。
B.
设定传输的数据到指定的从机设备地址。
C.
传送数据。
D.
初始化I2C连接。
第 8 题 单选题
A.
MOSI
B.
MISO
C.
SS
D.
SCLK
第 9 题 单选题
A.
域名
B.
IP地址
C.
统一资源定位符URL
D.
文件夹
第 10 题 单选题
A.
比例控制
B.
积分控制
C.
微分控制
D.
闭环控制
第 11 题 单选题
A.
ipconfig
B.
msconfig
C.
ping
D.
dir
第 12 题 单选题
A.
1
B.
2
C.
3
D.
4
第 13 题 单选题
A.
SDA
B.
SCL
C.
MOSI
D.
MISO
第 14 题 单选题
A.
P控制
B.
D控制
C.
I控制
D.
PD控制
第 15 题 单选题
A.
反应式
B.
永磁式
C.
混合式
D.
直流式
第 16 题 单选题
A.
21
B.
25
C.
80
D.
110
第 17 题 单选题
A.
服务器
B.
客户端
C.
站点
D.
接入点
第 18 题 单选题
A.
I2C通信空闲时,数据线SDA和时钟线SCL总是处于低电平输出状态。
B.
I2C通信是串行通信。
C.
I2C通信中从设备都有一个唯一的地址。
D.
I2C通信是一种半双工通信方式。
第 19 题 单选题
A.
俯仰角
B.
偏航角
C.
滚转角
D.
加速度
第 20 题 单选题
A.
html
B.
CSS
C.
JavaScript
D.
HTTP
第 21 题 判断题
A.
三轴加速度
B.
三轴角速度
第 22 题 判断题
A.
MOSI引脚
B.
MISO引脚
第 23 题 判断题
A.
UART
B.
I2C
第 24 题 判断题
A.
TCP协议
B.
IP协议
第 25 题 判断题
A.
STA
B.
AP
第 26 题 判断题
A.
正确
B.
错误
第 27 题 判断题
A.
正确
B.
错误
第 28 题 判断题
A.
正确
B.
错误
第 29 题 判断题
A.
正确
B.
错误
第 30 题 判断题
A.
正确
B.
错误
发表评论 取消回复