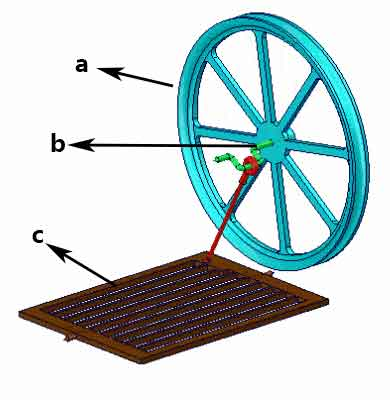
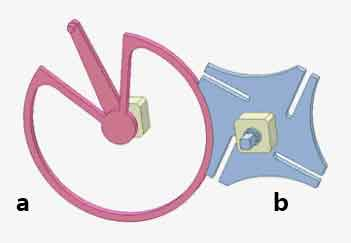
a
b
c
d
曲柄摇杆
双摇杆
平行双曲柄
曲柄滑块
编程机器人
示教再现型机器人
智能机器人
广义机器人
用来将电能转化为机械能
用来将机械能转化为电能
用来将动能转化为势能
用来将势能转化为动能
行星齿轮
棘轮机构
凸轮机构
滑轮组
液压驱动
气压驱动
电力驱动
风力驱动
是诸葛亮发明的用来运送军粮的机械装置
是用来计量车行驶路程的机械装置
是用来计量时间的机械装置
是用来娱乐的机械装置
棘轮机构
凸轮机构
槽轮机构
滑轮机构
由日本的机器人专家森昌弘提出
是美国科幻小说中提出的
含义是机器人过多会引起人类的恐慌
是捷克斯洛伐克剧作家卡尔·恰佩克提出的
可以在不同平面内连接
传动比无法计算
能缓冲吸振
比齿轮传动更适合远距离传动
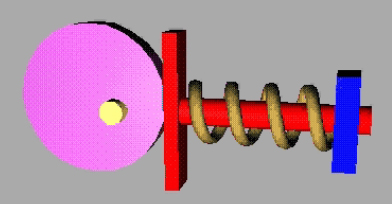
凸轮
从动件
滑块
棘爪
挖掘机
圆规
船桨
剪刀
滑轮组
凸轮机构
棘轮机构
滑杆机构
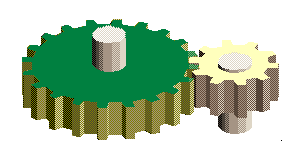
1:2
2:1
1:1
1:3
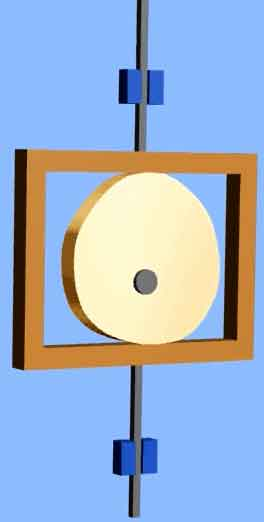
等宽凸轮机构
槽凸轮机构
棘轮机构
共轭凸轮机构
齿数比是1:2
半径比是1:2
传动比是1:2
周长比是1:2
重力
滑动摩擦力
滚动摩擦力
支持力
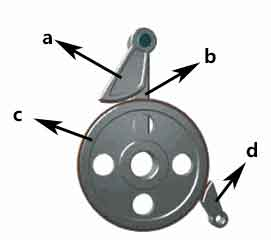
a是止回摆杆
b是止回棘爪
c是棘轮
d是主动棘爪
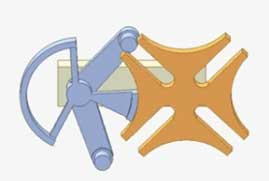
槽轮机构
棘轮机构
全齿轮啮合
凸轮机构
摩擦式棘轮机构动程可以无级调节
齿式棘轮机构动程只能有级调节
外啮合棘轮机构比内啮合棘轮机构更容易维修安装
棘轮机构一定有主动棘爪和止回棘爪两个棘爪
一节普通5号电池的电压大概是100v
中国家用电压是220v
人体安全电压是1.5v
高压线的电压大概是20v
采用了重力锁合
采用了槽凸轮机构锁合
采用了几何锁合
采用了弹力锁合
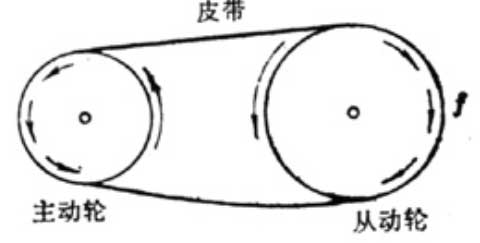
两带轮转向相同
这是交叉传动
这是垂直传动
这是半交叉传动
曲柄做往复摆动
曲柄做回转运动
摇杆做回转运动
连杆做回转运动
皮带传动
齿轮传动
链传动
履带传动
铁箱滑动时的摩擦是滚动摩擦
铁箱滑动时的摩擦是静摩擦
铁箱滑动之前的摩擦是滑动摩擦
铁箱滑动之前的摩擦是静摩擦
表面粗糙能增大摩擦力
表面粗糙可以减小摩擦力
这样更美观
摸上去手感好
左电机速度100,右电机速度0
左电机速度0,右电机速度100
左电机速度100,右电机速度50
左电机速度50,左电机速度100
带圆销件的一般是主动件
带槽的一般是主动件
从动件一般做等速圆周运动
主动件一般左右摆动

属于外啮合棘轮
属于内啮合棘轮
属于凸轮机构
属于槽轮机构
机翼上侧气流速度快
机翼下侧气流速度快
转向不足
同等条件下重量比后驱车大
鞋底一般有花纹是为了增加摩擦力,防止打滑
自行车采用了皮带传动
都适合远距离传动
链轮或齿轮的转向都相同
左边的零件是主动件
右边的零件是主动件
发表评论 取消回复