



机械部分
传感部分
控制部分
传动部分
电力驱动
液压驱动
气压驱动
水驱动
三角形比四边形更稳定
通过重心作竖直向下的直线与地面的交点,如果在接触面外,则物体较稳
与地面接触面积越大,物体越稳
重心越低,物体越稳
金字塔
吊车
秋千支架
拉伸门
在手将要推动小车之前,小车与桌面之间存在静摩擦力
小车会在桌面上滑动一段距离后停下
小车行驶过程中受重力、滑动摩擦力
小车会一直在桌上保持匀速运动下去
功的大小是力乘以力的方向上移动的距离,单位是焦耳
只要省力就会费距离,费力就会省距离
使同一物体达到相同的作用效果,对他做的功不是固定的
任何机械都不省功
1
2
5
10
从最低点到最高点的过程中,速度越来越小
从最低点到最高点的过程中,动能转化为重力势能
到达最低点时,速度最大
到达最高点时,重力势能全部转化为动能
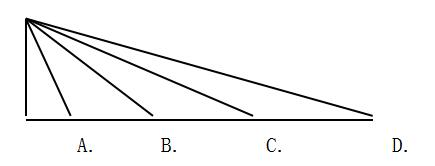
A
B
C
D
斧头
锤子
扳手
螺丝刀
左边的小朋友坐的更靠近支点
右边的小朋友坐的更靠近支点
左右两个小朋友互换位置
右边的小朋友坐的更远离支点
门把手
指甲刀
扳手
筷子
省力
费力
既不省力也不费力
省力也可省距离
升速
降速
匀速
不确定
角速度是指圆周运动中在单位时间内转过的弧度,即齿轮每秒转动的角度。
线速度是指圆周运动中在单位时间内转过的曲线长度。
转速是指圆周运动中在单位时间内转过的圈数。
线速度一定,齿轮越大,角速度和转速越大。
平齿轮
冠齿轮
涡轮
滑轮

50
100
200
300
准确无误的传递动力
传动力大
结构紧凑
噪音大
1500rpm
240rpm
300rpm
1200rpm
轮轴的实质是一个能够连续旋转的杠杆
动力作用在轮上,则轮轴为省力杠杆
动力作用在轴上,轮和轴的半径相差越大则省力
轮轴工具的外形不一定是圆形的,但受力作用后的运动轨迹一定是圆形的
1
2
3
没有动滑轮
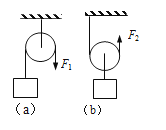
F1=F2
F1
F1>F2
不确定
省力当但不能改变力的方向
能改变力的方向但不能省力
既能改变力的方向又能省力
能够减小手动工作的距离
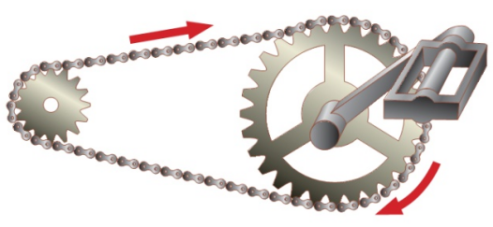
两个链轮的转向相同
大链轮的转速较大
大链轮是从动轮
小链轮是主动轮
履带是围绕着主动轮、负重轮、诱导轮和托带轮的柔性链环
履带是一种传动装置,从理论上来说与传动链相同
履带增大了与地面接触面积,分散了压力,减小对于地面压强
履带减少了与地面的摩擦力
可以在两轴中心相距较远的情况下传递运动和动力
提高转速
增加动力
齿轮传动都具有链传动所有优点
一个定滑轮
一个动滑轮
杠杆
斜面
龙舟比赛用的船桨
开瓶用的瓶起子
理发用的剪刀
旗杆顶的定滑轮
皮带的噪音比齿轮和传动链的小
传动链、皮带可以远距离传递动力
皮带、齿轮、传动链结构中的两轮转动方向都必须是同向
传动链每一节都可以拆卸,所以传动的距离可以自由调节
机器人总动员
大鱼海棠
门把手
水杯
镊子
钓鱼竿
机器人驱动方式有电力驱动、 液压驱动,气压驱动
工业机器人可用于恶劣环境,工作强度大、时间长
篮球架
照相三角支架
发表评论 取消回复