应用层
传输层
网络层
网络接口层
Pitch
Yaw
DMP
Roll
发送并同时接受一个字节的数据
启动SPI通信
将发送数据加入到发送队列
初始化SPI接口
启动步进电机,并以设定的速度值恒定转动。
启动步进电机,并以设定的加速度和最大速度值转动。
设定步进电机的最大速度。
设定步进电机的加速度。
IPV4
IPV6
服务器
接入端
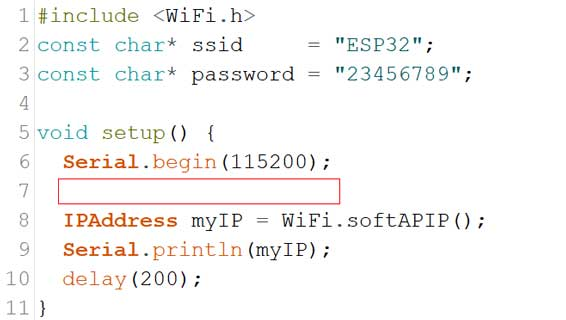
WiFi.softAP(ssid, password);
WiFi.begin(ssid, password);
server.softAP(ssid, password);
server.begin(ssid, password);
低电平 低电平
高电平 低电平
高电平 高电平
低电平 高电平
Wire.begin()
Wire.write()
Wire.available()
Wire.requestFrom()
显示文件夹和文件名
查看当前计算机配置
检查网络是否通畅以及网络连接速度
查看当前计算机的IP配置
SDA
SCL
TX
RX
步进电机转动采用电脉冲信号控制。
步进电机转动的速度与脉冲频率成反比。
步进电机是执行器。
步进电机运转时,不会产生误差累计。
加速度传感器
陀螺仪
DMP
磁力计
SCLK
MOSI
MISO
SCL
HTTP/1.1 200 OK
GET / HTTP / 1.1
Conten-type:text/html
HTTP/1.1 404 not found
创建一个STA,并连接到SSID。
创建一个softAP,并设定SSID和密码。
返回softAP的IP地址。
启动Web服务器。
TCP
UDP
FTP
POP3
本地计算机
服务器端
本地计算机和服务器端随机发起
本地计算机和服务器端轮询发起
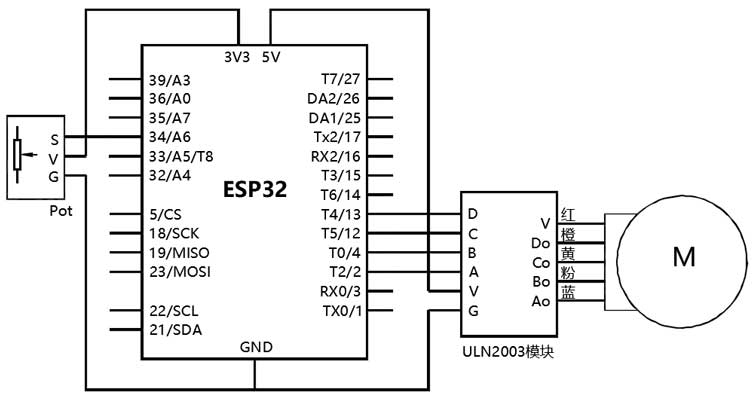
AccelStepper stepper(4,2,4,12,13);
AccelStepper stepper(4,2,12,4,13);
AccelStepper stepper(4,2,4);
AccelStepper stepper(4,12,13);
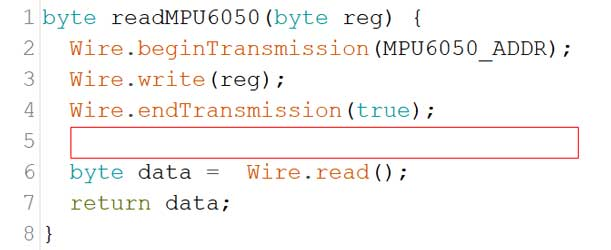
Wire.begin()
Wire.requestFrom(reg,1)
if(Wire.available())
Wire.requestFrom(MPU6050_ADDR,1)
P控制
I控制
UART
I2C
±2
±4
21
53
Server Client
STA
发表评论 取消回复