安卓
麒麟
鸿蒙
红旗
仅SDA数据线通过上拉电阻连接到VCC
仅SCL数据线通过上拉电阻连接到VCC
SDA和SCL数据线均通过上拉电阻连接到VCC
SDA和SCL数据线均通过下拉电阻连接到GND
仅主设备
仅从设备
主设备和从设备同时发起
主设备和从设备随机发起
Wire.begin()
Wire.beginTransmission()
Wire.endTransmission()
Wire.requestFrom()
将向从设备发送的数据加入到发送队列
初始化I2C
主设备将数据发送给从设备
主设备从从设备读取数据
Accelerator
Gyroscope
DMP
SDA&SCL
250°/s
500°/s
1000°/s
2000°/s
获取的角速度数据就是当前状态的瞬时角速度
获得的角速度数据乘以当前量程后才是当前状态的瞬时角速度
获得的角速度数据除以当前量程后才是当前状态的瞬时角速度
以上都不对
俯仰角
偏航角
滚转角
角速度
SCLK
MOSI
MISO
SS
16和32
16和64
32和64
32和128
主设备
从设备
服务器
客户端
网络接口层
传输层
网络层
应用层
regedit
msconfig
ping
ipconfig
标记网页的开始和结尾
标记网页头部的开始和结尾
标记网页主题的开始和结尾
标记网页段落的开始和结尾
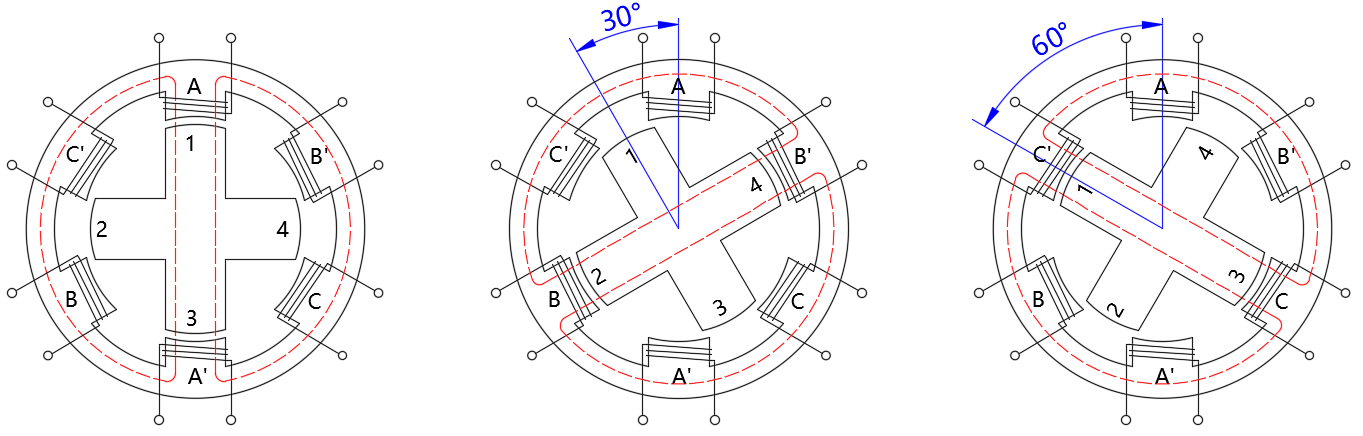
三相单三拍
三相双三拍
三相单双三拍
三相单双六拍
以STA模式连接到AP
返回softAP的IP地址
创建一个接入点,并设置SSID和密码
启动web服务器
无刷式步进电机
反应式步进电机
永磁式步进电机
混合式步进电机
比例控制
积分控制
微分控制
闭环控制
远程登录
未加密文本通信
Web服务
域名解析
I2C通信空闲时,数据线SDA和时钟线SCL总是处于高电平状态。
I2C通信是串行通信。
域名
IP地址
STA
AP
步进电机转动通过电脉冲信号控制。
步进电机转动的速度与脉冲频率成正比。
UART
I2C
发表评论 取消回复