主设备
从设备
服务器
客户端
I2C总线上的设备没有有主从之分
I2C通信是并行通信
I2C通信中从设备都有一个唯一的地址
I2C数据线SDA只能单向传送数据




获取的加速度数据就是当前状态的瞬时加速度
获得的加速度数据乘以当前量程后才是当前状态的瞬时加速度
获得的加速度数据除以当前量程后才是当前状态的瞬时加速度
以上都不对
±2g
±4g
±8g
±16g
俯仰角
偏航角
滚转角
角加速度
WiFi.begin()
WiFi.softAP()
WiFi.localIP()
WiFi.softAPIP()
是一种同步,半双工通信方式
是一种异步,半双工通信方式
是一种同步,全双工通信方式
是一种异步,全双工通信方式
FTP
HTTP
DNS
POP3
Accelerator/DMP
Accelerator/Gyroscope
Gyroscope/DMP
Gyroscope/Accelerator
比例控制
积分控制
微分控制
闭环控制
Wire.begin()
Wire.beginTransmission()
Wire.endTransmission()
Wire.requestFrom()
是一种同步,半双工通信方式
是一种异步,半双工通信方式
是一种同步,全双工通信方式
是一种异步,全双工通信方式
发送数据
接受数据
发送和接受数据
发送时钟数据
仅SDA数据线通过上拉电阻连接到VCC
仅SCL数据线通过上拉电阻连接到VCC
SDA和SCL数据线均通过上拉电阻连接到VCC
SDA和SCL数据线均通过下拉电阻连接到GND
SCLK
MOSI
MISO
SS
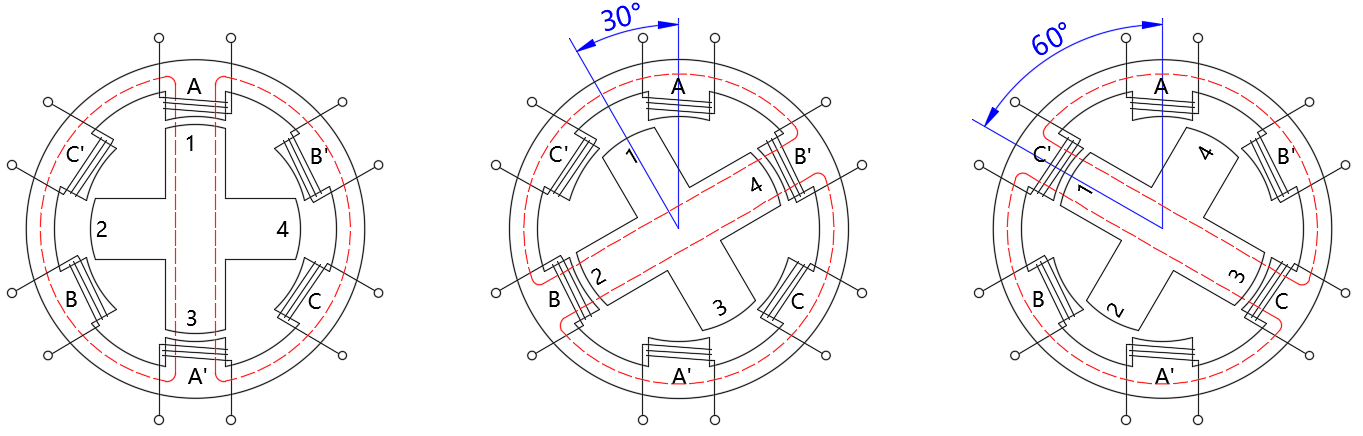
A → AB → B → BC → C → CA
A → B → C → A
A → C → B → A
AB → BC → CA → AB
2
3
4
8
网络接口层
传输层
网络层
应用层
显示当前计算机的网络连接信息
用于检测WiFi是否连通
打开命令行窗口
配置当前网络
无刷式
反应式
域名
IP地址
UART
I2C
STA
AP
P控制
I控制
发表评论 取消回复