答题卡一、单选题1234567891011121314151617181920二、多选题2122232425三、判断题2627282930 题目总数:30 总分数:100 时间:不限时
</p> </div>
</div>
<div class="item" data-choice="B">
<div class="choice">B.</div>
<div class="optioncontent" > <p><head></p> </div>
</div>
<div class="item" data-choice="C">
<div class="choice">C.</div>
<div class="optioncontent" > <p><body></p> </div>
</div>
<div class="item" data-choice="D">
<div class="choice">D.</div>
<div class="optioncontent" > <p><span style="color: #333333; font-family: Calibri; font-size: 16px; background-color: #FFFFFF;"><html></span></p> </div>
</div>
</div>
<div class="answer-result"></div>
</div>
</div>
</div>
<div class="pb-question-view-number">
<div> <span class="num tag">第 12 题 单选题</span></div>
</div>
<div class="pb-question-view">
<div class="body">
<div class="question" data-question-type="singleChoice">
<div class="question ub-html">
<a href="/question-GESP-Scratch/16132.html" > <p>步进电机类库 AccelStepper 的成员函数中,用于设定步进电机最大允许转速的成员函数是?( )</p></a>
</div>
<div class="option">
<div class="item" data-choice="A">
<div class="choice">A.</div>
<div class="optioncontent" > <p>AccelStepper.runSpeed()</p> </div>
</div>
<div class="item" data-choice="B">
<div class="choice">B.</div>
<div class="optioncontent" > <p>AccelStepper.setSpeed()</p> </div>
</div>
<div class="item" data-choice="C">
<div class="choice">C.</div>
<div class="optioncontent" > <p>AccelStepper.setCurrentPosition()</p> </div>
</div>
<div class="item" data-choice="D">
<div class="choice">D.</div>
<div class="optioncontent" > <p>AccelStepper.setMaxSpeed()</p> </div>
</div>
</div>
<div class="answer-result"></div>
</div>
</div>
</div>
<div class="pb-question-view-number">
<div> <span class="num tag">第 13 题 单选题</span></div>
</div>
<div class="pb-question-view">
<div class="body">
<div class="question" data-question-type="singleChoice">
<div class="question ub-html">
<a href="/question-GESP-Scratch/16133.html" > <p>使用步进电机类库 AccelStepper,通过 ULN2003 控制 24BJY48 步进电机转动,下列所示程序中,用于初始化设置步进电机以恒定转速 400 转动的程序是?( )</p></a>
</div>
<div class="option">
<div class="item" data-choice="A">
<div class="choice">A.</div>
<div class="optioncontent" > <p><img src="/uploads/202405/28/36123280955271.png"/></p> </div>
</div>
<div class="item" data-choice="B">
<div class="choice">B.</div>
<div class="optioncontent" > <p><img src="/uploads/202405/28/36123280955272.png"/></p> </div>
</div>
<div class="item" data-choice="C">
<div class="choice">C.</div>
<div class="optioncontent" > <p><img src="/uploads/202405/28/36123280955273.png"/></p> </div>
</div>
<div class="item" data-choice="D">
<div class="choice">D.</div>
<div class="optioncontent" > <p><img src="/uploads/202405/28/36123280955274.png"/></p> </div>
</div>
</div>
<div class="answer-result"></div>
</div>
</div>
</div>
<div class="pb-question-view-number">
<div> <span class="num tag">第 14 题 单选题</span></div>
</div>
<div class="pb-question-view">
<div class="body">
<div class="question" data-question-type="singleChoice">
<div class="question ub-html">
<a href="/question-GESP-Scratch/16134.html" > <p>ESP32 主控板向一个 I2C 接口的外设模块写入数据,部分程序如下,程序中 A/B/C 分别是?( )</p><p><img src="/uploads/202405/28/36124280955271.png"/></p></a>
</div>
<div class="option">
<div class="item" data-choice="A">
<div class="choice">A.</div>
<div class="optioncontent" > <p>外设模块的地址 / 写入的数据内容 / 模块的寄存器地址</p> </div>
</div>
<div class="item" data-choice="B">
<div class="choice">B.</div>
<div class="optioncontent" > <p>外设模块的地址 / 模块的寄存器地址 / 写入的数据内容</p> </div>
</div>
<div class="item" data-choice="C">
<div class="choice">C.</div>
<div class="optioncontent" > <p> 模块的寄存器地址 / 外设模块的地址 / 写入的数据内容</p> </div>
</div>
<div class="item" data-choice="D">
<div class="choice">D.</div>
<div class="optioncontent" > <p>模块的寄存器地址 / 写入的数据内容 / 外设模块的地址</p> </div>
</div>
</div>
<div class="answer-result"></div>
</div>
</div>
</div>
<div class="pb-question-view-number">
<div> <span class="num tag">第 15 题 单选题</span></div>
</div>
<div class="pb-question-view">
<div class="body">
<div class="question" data-question-type="singleChoice">
<div class="question ub-html">
<a href="/question-GESP-Scratch/16135.html" > <p>2024 年初,OpenAI 发布了文生视频人工智能生成模型,该模型的名称是?( )</p></a>
</div>
<div class="option">
<div class="item" data-choice="A">
<div class="choice">A.</div>
<div class="optioncontent" > <p>ChatGPT</p> </div>
</div>
<div class="item" data-choice="B">
<div class="choice">B.</div>
<div class="optioncontent" > <p>DALL-E</p> </div>
</div>
<div class="item" data-choice="C">
<div class="choice">C.</div>
<div class="optioncontent" > <p>AlphaZero</p> </div>
</div>
<div class="item" data-choice="D">
<div class="choice">D.</div>
<div class="optioncontent" > <p>Sora</p> </div>
</div>
</div>
<div class="answer-result"></div>
</div>
</div>
</div>
<div class="pb-question-view-number">
<div> <span class="num tag">第 16 题 单选题</span></div>
</div>
<div class="pb-question-view">
<div class="body">
<div class="question" data-question-type="singleChoice">
<div class="question ub-html">
<a href="/question-GESP-Scratch/16136.html" > <p>使用 ESP32 for Arduino I2C 类库,下列选项中,当主设备向从设备发送读取数据请求时,对应的成员函数是?( )</p></a>
</div>
<div class="option">
<div class="item" data-choice="A">
<div class="choice">A.</div>
<div class="optioncontent" > <p>Wire.read()</p> </div>
</div>
<div class="item" data-choice="B">
<div class="choice">B.</div>
<div class="optioncontent" > <p>Wire.write()</p> </div>
</div>
<div class="item" data-choice="C">
<div class="choice">C.</div>
<div class="optioncontent" > <p>Wire.requestFrom()</p> </div>
</div>
<div class="item" data-choice="D">
<div class="choice">D.</div>
<div class="optioncontent" > <p>Wire.beginTransmission()</p> </div>
</div>
</div>
<div class="answer-result"></div>
</div>
</div>
</div>
<div class="pb-question-view-number">
<div> <span class="num tag">第 17 题 单选题</span></div>
</div>
<div class="pb-question-view">
<div class="body">
<div class="question" data-question-type="singleChoice">
<div class="question ub-html">
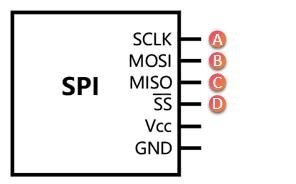
<a href="/question-GESP-Scratch/16137.html" > <p>I2C 串行通信的两根数据线中,用于发送数据信号的是?( )</p></a>
</div>
<div class="option">
<div class="item" data-choice="A">
<div class="choice">A.</div>
<div class="optioncontent" > <p>SDA</p> </div>
</div>
<div class="item" data-choice="B">
<div class="choice">B.</div>
<div class="optioncontent" > <p>SCL</p> </div>
</div>
<div class="item" data-choice="C">
<div class="choice">C.</div>
<div class="optioncontent" > <p>MOS</p> </div>
</div>
<div class="item" data-choice="D">
<div class="choice">D.</div>
<div class="optioncontent" > <p>MISO</p> </div>
</div>
</div>
<div class="answer-result"></div>
</div>
</div>
</div>
<div class="pb-question-view-number">
<div> <span class="num tag">第 18 题 单选题</span></div>
</div>
<div class="pb-question-view">
<div class="body">
<div class="question" data-question-type="singleChoice">
<div class="question ub-html">
<a href="/question-GESP-Scratch/16138.html" > <p>ESP32 for Arduino, ESP32 主控板以 AP 模式创建 Web 服务器,SSID 为“AA”,密码为“BB”,下列选项中,部分初始化程序正确的是?( )</p></a>
</div>
<div class="option">
<div class="item" data-choice="A">
<div class="choice">A.</div>
<div class="optioncontent" > <p><img src="/uploads/202405/28/36128280955271.png"/></p> </div>
</div>
<div class="item" data-choice="B">
<div class="choice">B.</div>
<div class="optioncontent" > <p><img src="/uploads/202405/28/36128280955272.png"/></p> </div>
</div>
<div class="item" data-choice="C">
<div class="choice">C.</div>
<div class="optioncontent" > <p><img src="/uploads/202405/28/36128280955273.png"/></p> </div>
</div>
<div class="item" data-choice="D">
<div class="choice">D.</div>
<div class="optioncontent" > <p><img src="/uploads/202405/28/36128280955274.png"/></p> </div>
</div>
</div>
<div class="answer-result"></div>
</div>
</div>
</div>
<div class="pb-question-view-number">
<div> <span class="num tag">第 19 题 单选题</span></div>
</div>
<div class="pb-question-view">
<div class="body">
<div class="question" data-question-type="singleChoice">
<div class="question ub-html">
<a href="/question-GESP-Scratch/16139.html" > <p>ESP32 for Arduino,客户端向服务器端发送查询数据 HTTP 请求,所对应的方法是?( )</p></a>
</div>
<div class="option">
<div class="item" data-choice="A">
<div class="choice">A.</div>
<div class="optioncontent" > <p>GET</p> </div>
</div>
<div class="item" data-choice="B">
<div class="choice">B.</div>
<div class="optioncontent" > <p>PUT</p> </div>
</div>
<div class="item" data-choice="C">
<div class="choice">C.</div>
<div class="optioncontent" > <p>POST</p> </div>
</div>
<div class="item" data-choice="D">
<div class="choice">D.</div>
<div class="optioncontent" > <p>PATCH</p> </div>
</div>
</div>
<div class="answer-result"></div>
</div>
</div>
</div>
<div class="pb-question-view-number">
<div> <span class="num tag">第 20 题 单选题</span></div>
</div>
<div class="pb-question-view">
<div class="body">
<div class="question" data-question-type="singleChoice">
<div class="question ub-html">
<a href="/question-GESP-Scratch/16140.html" > <p>关于 ESP32 for Arduino I2C 类库成员函数 available()的功能,下列描述正确的是?( )</p></a>
</div>
<div class="option">
<div class="item" data-choice="A">
<div class="choice">A.</div>
<div class="optioncontent" > <p>从接收缓冲区中接收数据</p> </div>
</div>
<div class="item" data-choice="B">
<div class="choice">B.</div>
<div class="optioncontent" > <p>判断当前连接是否可用</p> </div>
</div>
<div class="item" data-choice="C">
<div class="choice">C.</div>
<div class="optioncontent" > <p>将从设备的地址加入到发送数据队列</p> </div>
</div>
<div class="item" data-choice="D">
<div class="choice">D.</div>
<div class="optioncontent" > <p>返回接收缓冲区的字节数</p> </div>
</div>
</div>
<div class="answer-result"></div>
</div>
</div>
</div>
<div class="pb-question-view-number">
<div> <span class="num tag">第 21 题 判断题</span></div>
</div>
<div class="pb-question-view">
<div class="body">
<div class="question" data-question-type="singleChoice">
<div class="question ub-html">
<a href="/question-GESP-Scratch/16141.html" > <p>下列选项中,用于表示计算机在互联网上的标识符的有?( )</p></a>
</div>
<div class="option">
<div class="item" data-choice="A">
<div class="choice">A.</div>
<div class="optioncontent" > <p> 域名</p> </div>
</div>
<div class="item" data-choice="B">
<div class="choice">B.</div>
<div class="optioncontent" > <p>IP 地址</p> </div>
</div>
</div>
<div class="answer-result"></div>
</div>
</div>
</div>
<div class="pb-question-view-number">
<div> <span class="num tag">第 22 题 判断题</span></div>
</div>
<div class="pb-question-view">
<div class="body">
<div class="question" data-question-type="singleChoice">
<div class="question ub-html">
<a href="/question-GESP-Scratch/16142.html" > <p>MPU6050 姿态传感器是比较典型的 MEMS 传感器,MEMS 传感器的优点有?( )</p></a>
</div>
<div class="option">
<div class="item" data-choice="A">
<div class="choice">A.</div>
<div class="optioncontent" > <p>体积很小</p> </div>
</div>
<div class="item" data-choice="B">
<div class="choice">B.</div>
<div class="optioncontent" > <p>重量很轻</p> </div>
</div>
</div>
<div class="answer-result"></div>
</div>
</div>
</div>
<div class="pb-question-view-number">
<div> <span class="num tag">第 23 题 判断题</span></div>
</div>
<div class="pb-question-view">
<div class="body">
<div class="question" data-question-type="singleChoice">
<div class="question ub-html">
<a href="/question-GESP-Scratch/16143.html" > <p>当在计算机上浏览网页时,下列选项所列协议中,使用到的有?( )</p></a>
</div>
<div class="option">
<div class="item" data-choice="A">
<div class="choice">A.</div>
<div class="optioncontent" > <p>HTTP 协议</p> </div>
</div>
<div class="item" data-choice="B">
<div class="choice">B.</div>
<div class="optioncontent" > <p>TCP 协议</p> </div>
</div>
</div>
<div class="answer-result"></div>
</div>
</div>
</div>
<div class="pb-question-view-number">
<div> <span class="num tag">第 24 题 判断题</span></div>
</div>
<div class="pb-question-view">
<div class="body">
<div class="question" data-question-type="singleChoice">
<div class="question ub-html">
<a href="/question-GESP-Scratch/16144.html" > <p>下列选项中,有关 I2C 描述正确的有?( )</p></a>
</div>
<div class="option">
<div class="item" data-choice="A">
<div class="choice">A.</div>
<div class="optioncontent" > <p>I2C 通信是串行、同步、半双工通信</p> </div>
</div>
<div class="item" data-choice="B">
<div class="choice">B.</div>
<div class="optioncontent" > <p>I2C 通信采用主从模式</p> </div>
</div>
</div>
<div class="answer-result"></div>
</div>
</div>
</div>
<div class="pb-question-view-number">
<div> <span class="num tag">第 25 题 判断题</span></div>
</div>
<div class="pb-question-view">
<div class="body">
<div class="question" data-question-type="singleChoice">
<div class="question ub-html">
<a href="/question-GESP-Scratch/16145.html" > <p>PID 控制器是比例-积分-微分控制器的简称,下列选项中,常用的 PID 控制器有?( )</p></a>
</div>
<div class="option">
<div class="item" data-choice="A">
<div class="choice">A.</div>
<div class="optioncontent" > <p>P 控制</p> </div>
</div>
<div class="item" data-choice="B">
<div class="choice">B.</div>
<div class="optioncontent" > <p>PI 控制</p> </div>
</div>
</div>
<div class="answer-result"></div>
</div>
</div>
</div>
<div class="pb-question-view-number">
<div> <span class="num tag">第 26 题 判断题</span></div>
</div>
<div class="pb-question-view">
<div class="body">
<div class="question" data-question-type="singleChoice">
<div class="question ub-html">
<a href="/question-GESP-Scratch/16146.html" > <p>计算机通过 WiFi 连接到 ESP32 主控板,此时 ESP32 主控板工作于 STA 模式。( )</p></a>
</div>
<div class="option">
<div class="item" data-choice="A">
<div class="choice">A.</div>
<div class="optioncontent" > 正确 </div>
</div>
<div class="item" data-choice="B">
<div class="choice">B.</div>
<div class="optioncontent" > 错误 </div>
</div>
</div>
<div class="answer-result"></div>
</div>
</div>
</div>
<div class="pb-question-view-number">
<div> <span class="num tag">第 27 题 判断题</span></div>
</div>
<div class="pb-question-view">
<div class="body">
<div class="question" data-question-type="singleChoice">
<div class="question ub-html">
<a href="/question-GESP-Scratch/16147.html" > <p>I2C 通信时,可同步发送和接受数据。( )</p></a>
</div>
<div class="option">
<div class="item" data-choice="A">
<div class="choice">A.</div>
<div class="optioncontent" > 正确 </div>
</div>
<div class="item" data-choice="B">
<div class="choice">B.</div>
<div class="optioncontent" > 错误 </div>
</div>
</div>
<div class="answer-result"></div>
</div>
</div>
</div>
<div class="pb-question-view-number">
<div> <span class="num tag">第 28 题 判断题</span></div>
</div>
<div class="pb-question-view">
<div class="body">
<div class="question" data-question-type="singleChoice">
<div class="question ub-html">
<a href="/question-GESP-Scratch/16148.html" > <p>PID 控制器中的微分控制主要作用是消除振荡。( )</p></a>
</div>
<div class="option">
<div class="item" data-choice="A">
<div class="choice">A.</div>
<div class="optioncontent" > 正确 </div>
</div>
<div class="item" data-choice="B">
<div class="choice">B.</div>
<div class="optioncontent" > 错误 </div>
</div>
</div>
<div class="answer-result"></div>
</div>
</div>
</div>
<div class="pb-question-view-number">
<div> <span class="num tag">第 29 题 判断题</span></div>
</div>
<div class="pb-question-view">
<div class="body">
<div class="question" data-question-type="singleChoice">
<div class="question ub-html">
<a href="/question-GESP-Scratch/16149.html" > <p>SPI 通信的时钟模式有四种选择。( )</p></a>
</div>
<div class="option">
<div class="item" data-choice="A">
<div class="choice">A.</div>
<div class="optioncontent" > 正确 </div>
</div>
<div class="item" data-choice="B">
<div class="choice">B.</div>
<div class="optioncontent" > 错误 </div>
</div>
</div>
<div class="answer-result"></div>
</div>
</div>
</div>
<div class="pb-question-view-number">
<div> <span class="num tag">第 30 题 判断题</span></div>
</div>
<div class="pb-question-view">
<div class="body">
<div class="question" data-question-type="singleChoice">
<div class="question ub-html">
<a href="/question-GESP-Scratch/16150.html" > <p>TCP/IP 协议指的是 TCP 协议和 IP 协议。( )</p></a>
</div>
<div class="option">
<div class="item" data-choice="A">
<div class="choice">A.</div>
<div class="optioncontent" > 正确 </div>
</div>
<div class="item" data-choice="B">
<div class="choice">B.</div>
<div class="optioncontent" > 错误 </div>
</div>
</div>
<div class="answer-result"></div>
</div>
</div>
</div>
</div>
</div>
</div>
<!-- E 正文 -->
</div>
<!-- S 付费阅读 -->
<!-- E 付费阅读 -->
<!-- S 点赞 -->
<div class="article-donate">
<a href="javascript:" class="btn btn-primary btn-like btn-lg" data-action="vote" data-type="like" data-id="15689" data-tag="archives"><i class="fa fa-thumbs-up"></i> 点赞(<span>0</span>)</a>
<a href="javascript:" class="btn btn-outline-primary btn-donate btn-lg" data-action="donate" data-id="15689" data-image="/assets/addons/cms/img/qrcode.png"><i class="fa fa-cny"></i> 打赏</a>
</div>
<!-- E 点赞 -->
<!-- S 分享 -->
<div class="social-share text-center mt-2 mb-1" data-initialized="true" data-mode="prepend" data-image="http://192.168.40.128:8003/assets/addons/cms/img/noimage.jpg">
<a href="javascript:" class="social-share-icon icon-heart addbookbark" data-type="archives" data-aid="15689" data-action="/addons/cms/ajax/collection.html"></a>
<a href="#" class="social-share-icon icon-weibo" target="_blank"></a>
<a href="#" class="social-share-icon icon-qq" target="_blank"></a>
<a href="#" class="social-share-icon icon-qzone" target="_blank"></a>
<a href="javascript:" class="social-share-icon icon-wechat"></a>
</div>
<!-- E 分享 -->
<div class="related-article">
<div class="row">
<!-- S 相关文章 -->
<div class="col-sm-3 col-xs-6">
<!--<a href="/paper-cie-Python5/14744.html" class="img-zoom">-->
<!-- <div class="embed-responsive embed-responsive-4by3">-->
<!-- <img src="http://192.168.40.128:8003/assets/addons/cms/img/noimage.jpg" alt="青少年软件编程(python五级)等级考试试卷-编程题(2023年12月)" class="embed-responsive-item">-->
<!-- </div>-->
<!--</a>-->
<h5 class="text-center"><a href="/paper-cie-Python5/14744.html">青少年软件编程(python五级)等级考试试卷-编程题(2023年12月)</a></h5>
</div>
<div class="col-sm-3 col-xs-6">
<!--<a href="/paper-cie-Robot2/380.html" class="img-zoom">-->
<!-- <div class="embed-responsive embed-responsive-4by3">-->
<!-- <img src="http://192.168.40.128:8003/assets/addons/cms/img/noimage.jpg" alt="青少年机器人技术(二级)等级考试试卷(2017年11月)" class="embed-responsive-item">-->
<!-- </div>-->
<!--</a>-->
<h5 class="text-center"><a href="/paper-cie-Robot2/380.html">青少年机器人技术(二级)等级考试试卷(2017年11月)</a></h5>
</div>
<div class="col-sm-3 col-xs-6">
<!--<a href="/paper-cie-Robot1/366.html" class="img-zoom">-->
<!-- <div class="embed-responsive embed-responsive-4by3">-->
<!-- <img src="http://192.168.40.128:8003/assets/addons/cms/img/noimage.jpg" alt="青少年机器人技术(一级)等级考试试卷(2017年11月)" class="embed-responsive-item">-->
<!-- </div>-->
<!--</a>-->
<h5 class="text-center"><a href="/paper-cie-Robot1/366.html">青少年机器人技术(一级)等级考试试卷(2017年11月)</a></h5>
</div>
<div class="col-sm-3 col-xs-6">
<!--<a href="/paper-cie-Robot2/17268.html" class="img-zoom">-->
<!-- <div class="embed-responsive embed-responsive-4by3">-->
<!-- <img src="http://192.168.40.128:8003/assets/addons/cms/img/noimage.jpg" alt="青少年机器人技术(二级)等级考试试卷-实操题(2024年6月)" class="embed-responsive-item">-->
<!-- </div>-->
<!--</a>-->
<h5 class="text-center"><a href="/paper-cie-Robot2/17268.html">青少年机器人技术(二级)等级考试试卷-实操题(2024年6月)</a></h5>
</div>
<div class="col-sm-3 col-xs-6">
<!--<a href="/paper-cie-Robot1/17266.html" class="img-zoom">-->
<!-- <div class="embed-responsive embed-responsive-4by3">-->
<!-- <img src="http://192.168.40.128:8003/assets/addons/cms/img/noimage.jpg" alt="青少年机器人技术(一级)等级考试试卷-实操题(2024年6月)" class="embed-responsive-item">-->
<!-- </div>-->
<!--</a>-->
<h5 class="text-center"><a href="/paper-cie-Robot1/17266.html">青少年机器人技术(一级)等级考试试卷-实操题(2024年6月)</a></h5>
</div>
<div class="col-sm-3 col-xs-6">
<!--<a href="/paper-cie-CPP8/17265.html" class="img-zoom">-->
<!-- <div class="embed-responsive embed-responsive-4by3">-->
<!-- <img src="http://192.168.40.128:8003/assets/addons/cms/img/noimage.jpg" alt="青少年软件编程(C/C++)8级等级考试真题试卷(2024年6月)" class="embed-responsive-item">-->
<!-- </div>-->
<!--</a>-->
<h5 class="text-center"><a href="/paper-cie-CPP8/17265.html">青少年软件编程(C/C++)8级等级考试真题试卷(2024年6月)</a></h5>
</div>
<div class="col-sm-3 col-xs-6">
<!--<a href="/paper-cie-CPP7/17264.html" class="img-zoom">-->
<!-- <div class="embed-responsive embed-responsive-4by3">-->
<!-- <img src="http://192.168.40.128:8003/assets/addons/cms/img/noimage.jpg" alt="青少年软件编程(C/C++)7级等级考试真题试卷(2024年6月)" class="embed-responsive-item">-->
<!-- </div>-->
<!--</a>-->
<h5 class="text-center"><a href="/paper-cie-CPP7/17264.html">青少年软件编程(C/C++)7级等级考试真题试卷(2024年6月)</a></h5>
</div>
<div class="col-sm-3 col-xs-6">
<!--<a href="/paper-cie-CPP6/17263.html" class="img-zoom">-->
<!-- <div class="embed-responsive embed-responsive-4by3">-->
<!-- <img src="http://192.168.40.128:8003/assets/addons/cms/img/noimage.jpg" alt="青少年软件编程(C/C++)6级等级考试真题试卷(2024年6月)" class="embed-responsive-item">-->
<!-- </div>-->
<!--</a>-->
<h5 class="text-center"><a href="/paper-cie-CPP6/17263.html">青少年软件编程(C/C++)6级等级考试真题试卷(2024年6月)</a></h5>
</div>
<div class="col-sm-3 col-xs-6">
<!--<a href="/paper-cie-CPP5/17262.html" class="img-zoom">-->
<!-- <div class="embed-responsive embed-responsive-4by3">-->
<!-- <img src="http://192.168.40.128:8003/assets/addons/cms/img/noimage.jpg" alt="青少年软件编程(C/C++)5级等级考试真题试卷(2024年6月)" class="embed-responsive-item">-->
<!-- </div>-->
<!--</a>-->
<h5 class="text-center"><a href="/paper-cie-CPP5/17262.html">青少年软件编程(C/C++)5级等级考试真题试卷(2024年6月)</a></h5>
</div>
<div class="col-sm-3 col-xs-6">
<!--<a href="/paper-cie-CPP4/17261.html" class="img-zoom">-->
<!-- <div class="embed-responsive embed-responsive-4by3">-->
<!-- <img src="http://192.168.40.128:8003/assets/addons/cms/img/noimage.jpg" alt="青少年软件编程(C/C++)4级等级考试真题试卷(2024年6月)" class="embed-responsive-item">-->
<!-- </div>-->
<!--</a>-->
<h5 class="text-center"><a href="/paper-cie-CPP4/17261.html">青少年软件编程(C/C++)4级等级考试真题试卷(2024年6月)</a></h5>
</div>
<div class="col-sm-3 col-xs-6">
<!--<a href="/paper-cie-CPP3/17260.html" class="img-zoom">-->
<!-- <div class="embed-responsive embed-responsive-4by3">-->
<!-- <img src="http://192.168.40.128:8003/assets/addons/cms/img/noimage.jpg" alt="青少年软件编程(C/C++)3级等级考试真题试卷(2024年6月)" class="embed-responsive-item">-->
<!-- </div>-->
<!--</a>-->
<h5 class="text-center"><a href="/paper-cie-CPP3/17260.html">青少年软件编程(C/C++)3级等级考试真题试卷(2024年6月)</a></h5>
</div>
<div class="col-sm-3 col-xs-6">
<!--<a href="/paper-cie-CPP2/17259.html" class="img-zoom">-->
<!-- <div class="embed-responsive embed-responsive-4by3">-->
<!-- <img src="http://192.168.40.128:8003/assets/addons/cms/img/noimage.jpg" alt="青少年软件编程(C/C++)2级等级考试真题试卷(2024年6月)" class="embed-responsive-item">-->
<!-- </div>-->
<!--</a>-->
<h5 class="text-center"><a href="/paper-cie-CPP2/17259.html">青少年软件编程(C/C++)2级等级考试真题试卷(2024年6月)</a></h5>
</div>
<div class="col-sm-3 col-xs-6">
<!--<a href="/paper-cie-CPP1/17258.html" class="img-zoom">-->
<!-- <div class="embed-responsive embed-responsive-4by3">-->
<!-- <img src="http://192.168.40.128:8003/assets/addons/cms/img/noimage.jpg" alt="青少年软件编程(C/C++)1级等级考试真题试卷(2024年6月)" class="embed-responsive-item">-->
<!-- </div>-->
<!--</a>-->
<h5 class="text-center"><a href="/paper-cie-CPP1/17258.html">青少年软件编程(C/C++)1级等级考试真题试卷(2024年6月)</a></h5>
</div>
<div class="col-sm-3 col-xs-6">
<!--<a href="/paper-cie-Python1/17251.html" class="img-zoom">-->
<!-- <div class="embed-responsive embed-responsive-4by3">-->
<!-- <img src="http://192.168.40.128:8003/assets/addons/cms/img/noimage.jpg" alt="青少年软件编程(python一级)等级考试试卷-编程题(2024年6月)" class="embed-responsive-item">-->
<!-- </div>-->
<!--</a>-->
<h5 class="text-center"><a href="/paper-cie-Python1/17251.html">青少年软件编程(python一级)等级考试试卷-编程题(2024年6月)</a></h5>
</div>
<div class="col-sm-3 col-xs-6">
<!--<a href="/paper-cie-Python1/17250.html" class="img-zoom">-->
<!-- <div class="embed-responsive embed-responsive-4by3">-->
<!-- <img src="http://192.168.40.128:8003/assets/addons/cms/img/noimage.jpg" alt="青少年软件编程(python一级)等级考试试卷-客观题(2024年6月)" class="embed-responsive-item">-->
<!-- </div>-->
<!--</a>-->
<h5 class="text-center"><a href="/paper-cie-Python1/17250.html">青少年软件编程(python一级)等级考试试卷-客观题(2024年6月)</a></h5>
</div>
<div class="col-sm-3 col-xs-6">
<!--<a href="/paper-cie-Python2/17249.html" class="img-zoom">-->
<!-- <div class="embed-responsive embed-responsive-4by3">-->
<!-- <img src="http://192.168.40.128:8003/assets/addons/cms/img/noimage.jpg" alt="青少年软件编程(python二级)等级考试试卷-编程题(2024年6月)" class="embed-responsive-item">-->
<!-- </div>-->
<!--</a>-->
<h5 class="text-center"><a href="/paper-cie-Python2/17249.html">青少年软件编程(python二级)等级考试试卷-编程题(2024年6月)</a></h5>
</div>
<!-- E 相关文章 -->
</div>
</div>
<div class="clearfix"></div>
</div>
</div>
<div class="panel panel-default" id="comments">
<div class="panel-heading">
<h3 class="panel-title">评论列表 <small>共有 <span>0</span> 条评论</small>
</h3>
</div>
<div class="panel-body">
<div id="comment-container">
<!-- S 评论列表 -->
<div id="commentlist">
<div class="loadmore loadmore-line loadmore-nodata"><span class="loadmore-tips">暂无评论</span></div>
</div>
<!-- E 评论列表 -->
<!-- S 评论分页 -->
<div id="commentpager" class="text-center">
</div>
<!-- E 评论分页 -->
<!-- S 发表评论 -->
<div id="postcomment">
<h3>发表评论 <a href="javascript:;">
<small>取消回复</small>
</a></h3>
<form action="/addons/cms/comment/post.html" method="post" id="postform">
<input type="hidden" name="__token__" value="b327f24bfd2839360b47355c65cddf85" /> <input type="hidden" name="type" value="archives"/>
<input type="hidden" name="aid" value="15689"/>
<input type="hidden" name="pid" id="pid" value="0"/>
<div class="form-group">
<textarea name="content" class="form-control" disabled placeholder="请登录后再发表评论" id="commentcontent" cols="6" rows="5" tabindex="4"></textarea>
</div>
<div class="form-group">
<a href="/index/user/login.html" class="btn btn-primary">登录</a>
<a href="/index/user/register.html" class="btn btn-outline-primary">注册新账号</a>
</div>
</form>
</div>
<!-- E 发表评论 -->
</div>
</div>
</div>
</main>
<aside class="col-xs-12 col-md-4">
<!--@formatter:off-->
<!-- S 关于作者 -->
<div class="panel panel-default about-author no-padding" data-id="1" itemProp="author" itemscope="" itemType="http://schema.org/Person">
<meta itemProp="name" content="Admin"/>
<meta itemProp="image" content="/assets/img/qrcode.png"/>
<meta itemProp="url" content="/u/1"/>
<div class="panel-body no-padding">
<div class="author-card">
<div class="author-head" style="background-image:url('/assets/addons/cms/img/author-head.jpeg');"></div>
<div class="author-avatar">
<a href="/u/1">
<img src="/assets/img/qrcode.png">
</a>
</div>
<div class="author-basic">
<div class="author-nickname">
<a href="/u/1">Admin</a>
</div>
<span class="text-muted">这家伙很懒,什么也没写!</span>
</div>
<div class="row author-statistics">
<div class="col-xs-4">
<div class="statistics-text">文章</div>
<div class="statistics-nums"><a href="/u/1/archives">16980</a></div>
</div>
<div class="col-xs-4">
<div class="statistics-text">评论</div>
<div class="statistics-nums"><a href="/u/1/comment">3</a></div>
</div>
<div class="col-xs-4">
<div class="statistics-text">加入时间</div>
<div class="statistics-nums">8年前</div>
</div>
</div>
</div>
</div>
</div>
<!-- E 关于作者 -->
<!--@formatter:on-->
<div class="panel panel-blockimg">
</div>
<!-- S 热门资讯 -->
<div class="panel panel-default hot-article">
<div class="panel-heading">
<h3 class="panel-title">推荐资讯</h3>
</div>
<div class="panel-body">
</div>
</div>
<!-- E 热门资讯 -->
<div class="panel panel-blockimg">
</div>
<!-- S 热门标签 -->
<div class="panel panel-default hot-tags">
<div class="panel-heading">
<h3 class="panel-title">热门标签</h3>
</div>
<div class="panel-body">
<div class="tags">
</div>
</div>
</div>
<!-- E 热门标签 -->
<!-- S 推荐下载 -->
<div class="panel panel-default recommend-article">
<div class="panel-heading">
<h3 class="panel-title">推荐下载</h3>
</div>
<div class="panel-body">
</div>
</div>
<!-- E 推荐下载 -->
<div class="panel panel-blockimg">
</div>
</aside>
</div>
</div>
</main>
<footer>
<div id="footer">
<div class="container">
<div class="row footer-inner">
<div class="col-xs-12">
<div class="footer-logo pull-left mr-4">
<a href="/"><i class="fa fa-bookmark"></i></a>
</div>
<div class="pull-left">
Copyright © 2026 All rights reserved. 青少年信息学考级竞赛题库 <a href="https://beian.miit.gov.cn" target="_blank">粤ICP备2023143479号</a>
<ul class="list-unstyled list-inline mt-2">
<li><a href="/p/aboutus.html">关于我们</a></li>
<li><a href="/p/agreement.html">用户协议</a></li>
<li><a href="/index/user/index.html">会员中心</a></li>
</ul>
</div>
</div>
</div>
</div>
</div>
</footer>
<div id="floatbtn">
<!-- S 浮动按钮 -->
<a href="javascript:;">
<i class="iconfont icon-wxapp"></i>
<div class="floatbtn-wrapper">
<div class="qrcode"><img src="/assets/addons/cms/img/qrcode.png"></div>
<p>微信小程序</p>
<p>微信扫一扫体验</p>
</div>
</a>
<a class="hover" href="/index/cms.archives/post.html" target="_blank">
<i class="iconfont icon-pencil"></i>
<em>立即<br>投稿</em>
</a>
<div class="floatbtn-item floatbtn-share">
<i class="iconfont icon-share"></i>
<div class="floatbtn-wrapper" style="height:50px;top:0">
<div class="social-share" data-initialized="true" data-mode="prepend">
<a href="#" class="social-share-icon icon-weibo" target="_blank"></a>
<a href="#" class="social-share-icon icon-qq" target="_blank"></a>
<a href="#" class="social-share-icon icon-qzone" target="_blank"></a>
<a href="#" class="social-share-icon icon-wechat"></a>
</div>
</div>
</div>
<a href="javascript:;">
<i class="iconfont icon-qrcode"></i>
<div class="floatbtn-wrapper">
<div class="qrcode"><img src="/assets/addons/cms/img/qrcode.png"></div>
<p>微信公众账号</p>
<p>微信扫一扫加关注</p>
</div>
</a>
<a id="feedback" class="hover" href="#comments">
<i class="iconfont icon-feedback"></i>
<em>发表<br>评论</em>
</a>
<a id="back-to-top" class="hover" href="javascript:;">
<i class="iconfont icon-backtotop"></i>
<em>返回<br>顶部</em>
</a>
<!-- E 浮动按钮 -->
</div>
<script type="text/javascript" src="/assets/libs/jquery/dist/jquery.min.js?v=1.0.640"></script>
<script type="text/javascript" src="/assets/libs/bootstrap/dist/js/bootstrap.min.js?v=1.0.640"></script>
<script type="text/javascript" src="/assets/libs/fastadmin-layer/dist/layer.js?v=1.0.640"></script>
<script type="text/javascript" src="/assets/libs/art-template/dist/template-native.js?v=1.0.640"></script>
<script type="text/javascript" src="/assets/addons/cms/js/jquery.autocomplete.js?v=1.0.640"></script>
<script type="text/javascript" src="/assets/addons/cms/js/swiper.min.js?v=1.0.640"></script>
<script type="text/javascript" src="/assets/addons/cms/js/share.min.js?v=1.0.640"></script>
<script type="text/javascript" src="/assets/addons/cms/js/cms.js?v=1.0.640"></script>
<script type="text/javascript" src="/assets/addons/cms/js/common.js?v=1.0.640"></script>
</body>
</html>
第 1 题 单选题
A.
192.168.1.10
B.
www.baidu.com
C.
http://www.kpcb.org.cn/h-col-147.html
D.
fe80::7998:ffc8:9c62:f181
第 2 题 单选题
A.
A
B.
B
C.
C
D.
D
第 3 题 单选题
A.
MPU6050 是一个九轴传感器
B.
MPU6050 集成了三轴陀螺仪
C.
MPU6050 集成了三轴加速度计
D.
MPU6050 集成了数字运动处理器
第 4 题 单选题
A.
设置数据的传送方式
B.
发送一个字节的数据,同时接收一个字节的数据
C.
发送时钟数据
D.
启动 SPI 通信事务
第 5 题 单选题
A.
IPV4 的地址长度是 32 位
B.
IPV4 的地址分为 4 段
C.
IPV4 地址各段用“.”隔开
D.
IPV4 地址使用 16 进制数表示
第 6 题 单选题
A.
SPI.begin()
B.
SPI.setBitOrder()
C.
SPI.setFrequency()
D.
SPI.setup()
第 7 题 单选题
A.
应用层 → 传输层 → 网络层 → 网络接口层
B.
网络接口层 → 网络层 → 传输层 → 应用层
C.
应用层 → 网络层 → 传输层 → 网络接口层
D.
网络接口层 → 传输层 → 网络层 → 应用层
第 8 题 单选题
A.
WiFi.begin()
B.
WiFi.softAP()
C.
WiFi.localIP()
D.
WiFi.softAPIP()
第 9 题 单选题
A.
ping 192.168.20.250
B.
ping 192.168.20.251
C.
ping 192.168.20.250 192.168.20.251
D.
ping 192.168.20.251 192.168.20.250
第 10 题 单选题
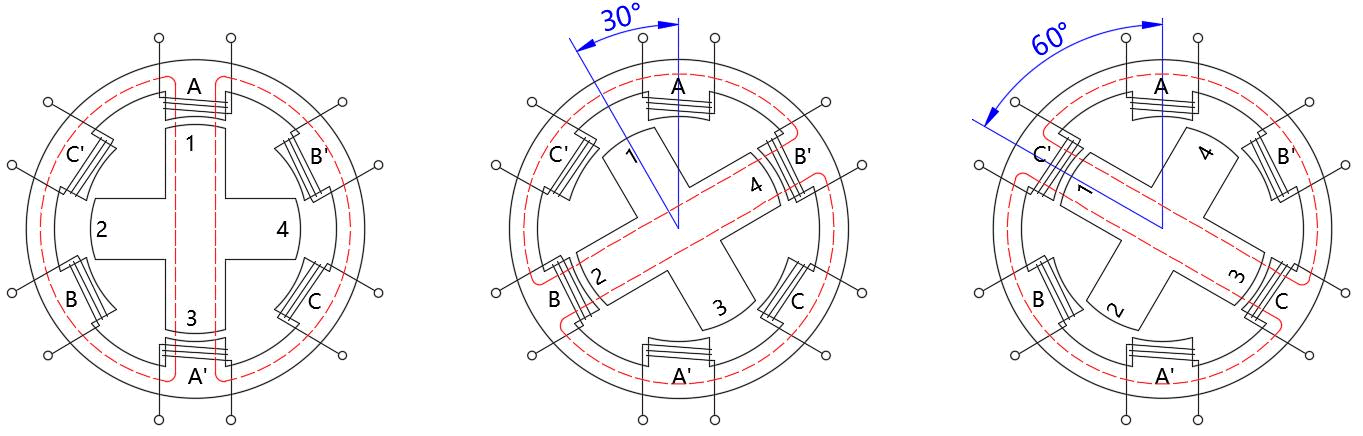
A.
三相单三拍
B.
三相单六拍
C.
三相双三拍
D.
三相单双六拍
第 11 题 单选题
A.