1
2
4
5
8位
16位
32位
64位

![]()
![]()
![]()
![]()
返回UART发送缓冲区中的字节数
返回UART接受缓冲区中的字节数
从UART缓冲区中读取数据
向UART缓冲区中写入数据
报文是按照约定好的格式组织起来的数据
millis()函数返回当前程序自开始运行至当前的时间
一般情况下,8x8点阵采用静态显示
UART通信时,通常使用两条信号线传送数据
![]()
![]()
![]()
![]()
ledcSetup()
ledcAttachPin()
ledcWriteTone()
ledcDetachPin()
touchRead()
touchWrite()
touchAttachInterrupt()
hallRead()
LEDC
SigmaDelta
DAC
ADC
设置模拟输入函数返回值的范围
设置模拟输入函数的通道
设置模拟输入函数的频率
设置模拟输入函数的工作模式
0x57
0x2B
0x15
0xBC
INPUT
OUTPUT
INPUT_PULLUP
INPUT_PULLDOWN
0xA5
0x5A
0
1
高电平
低电平
上升沿
下降沿
8位
10位
12位
32位
Arduino UNO/Nano 和ESP32 WROOM模组的工作电压均为5V
Arduino UNO/Nano 和ESP32 WROOM模组的工作电压均为3V
Arduino UNO/Nano的工作电压是5V,ESP32 WROOM模组的工作电压是3V
Arduino UNO/Nano的工作电压是5V,ESP32 WROOM模组的工作电压是3.3V
PWM的频率
PWM的分辨率
PWM的输出通道号
PWM的占空比
%d
\\n
\\r
\\t
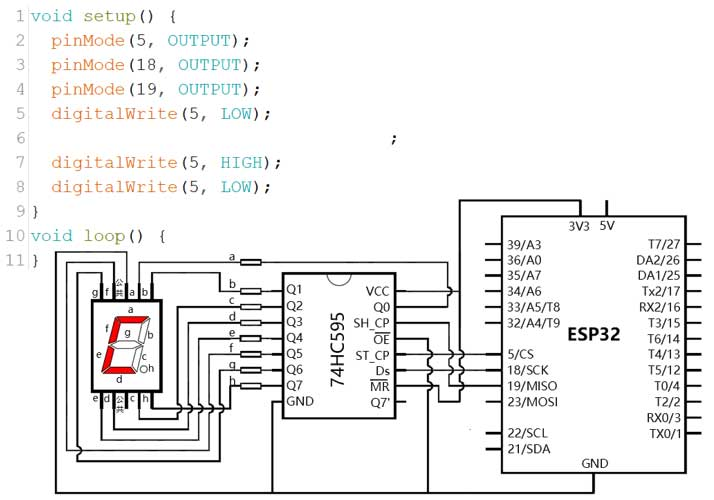
SH_CP
ST_CP
GPIO
UART
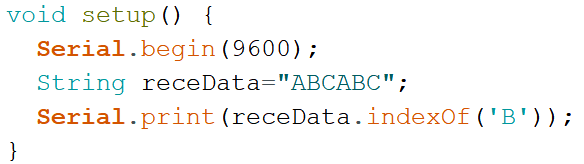
indexOf()
length()
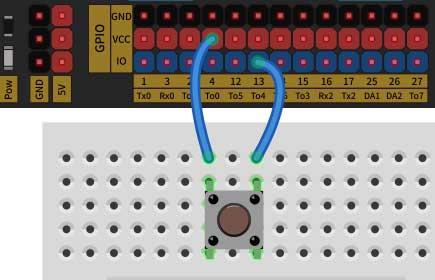
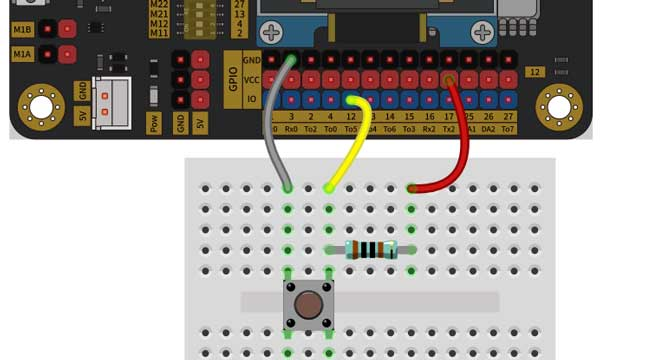
按键抖动是因为按键内金属簧片在接触瞬间是一个连续通断的过程
按键抖动分为前沿抖动和后沿抖动
CHANGE
ONHIGH
setup()函数和loop()函数不是必须的,可以删除
loop()中的程序指令会循环执行
setup()函数中不能使用循环结构
声明自定义函数时必须有返回值
发表评论 取消回复