
0
1
3
4
并行数据输出引脚
串行数据级联引脚
数据输入时钟引脚
串行数据输入引脚
ChatGPT
DALL-E
AlphaFold
Sora
10
40
80
128
8
10
11
13
analogRead()
analogSetup()
analogSetWidth()
analogAttach()
增大
变小
不确定
不变
表示八进制整数输出
表示十进制整数输出
表示十六进制整数输出
表示浮点数输出
ledcSetup
channel
freq
bit_num
LEDC
SigmaDelta
DAC
ADC
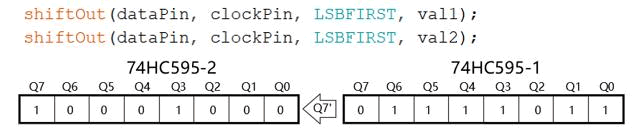
0x11 0xDE
0xDE 0x11
0x88 0x7B
0x7B 0x88
设定 EEPROM 的大小
向 EEPROM 中写入数据
提交数据,将写入的数据保存到 EEPROM 中
从 EEPROM 中读取一个字节的数据
引脚 pin 的电平由低电平变高电平时触发中断
引脚 pin 的电平由高电平变低电平时触发中断
引脚 pin 的电平发生变化时触发中断
引脚 pin 处于低电平时触发中断
RISING
FALLING
ONHIGH
ONLOW
设定指定 LEDC 通道的参数
将指定通道的 PWM 信号输出到 GPIO 引脚
向指定通道输出模拟信号
取消指定引脚的 PWM 信号输出
3
6
7
18
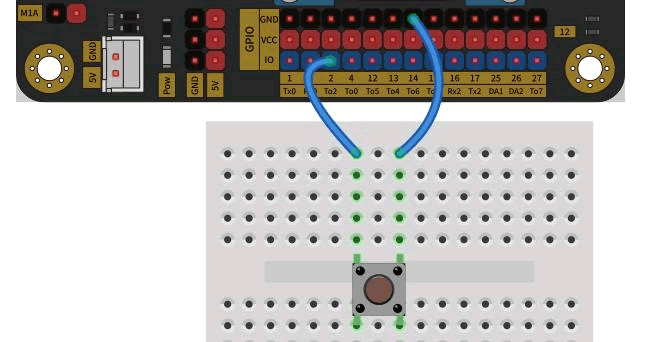
pinMode(16,INPUT_PULLUP); / val == HIGH
pinMode(16,INPUT_PULLUP); / val == LOW
pinMode(16,INPUT_PULLDOWN); / val == HIGH
pinMode(16,INPUT_PULLDOWN); / val == LOW
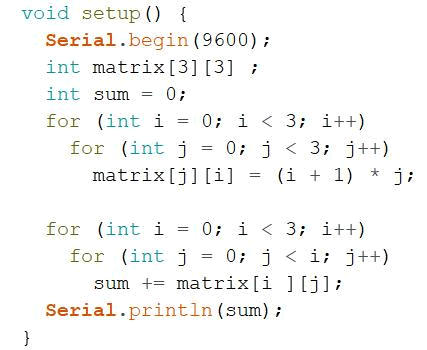
30
48
60
110000
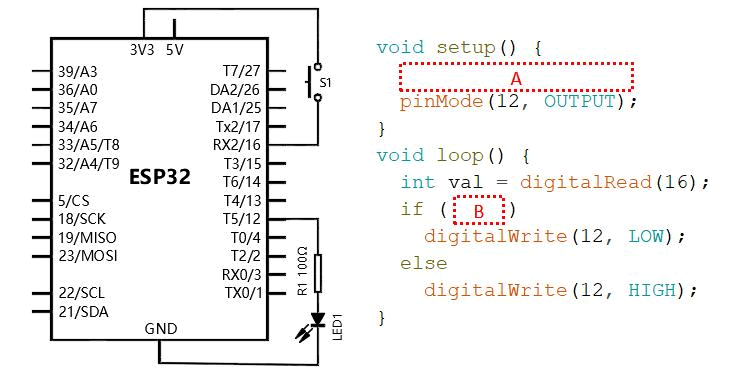
INPUT
OUTPUT
INPUT_PULLUP
INPUT_PULLDOWN
1 2
1 4
2 2
2 4
奇校验
偶校验
0~31
48~57
电容触摸传感器
蓝牙
发表评论 取消回复