1.5V
3V
36V
220V
左轮前进,右轮后退
左轮后退,右轮前进
左轮前进,右轮停转
左右轮均前进
增大压力以增大摩擦
使接触面粗糙以增大摩擦
减小摩擦
使接触面光滑来增大摩擦
a
b
c
d
a
b
c
d
a
b
c
d
一般使用凸轮机构
一般使用滑轮
一般使用棘轮机构
一般会使用皮带
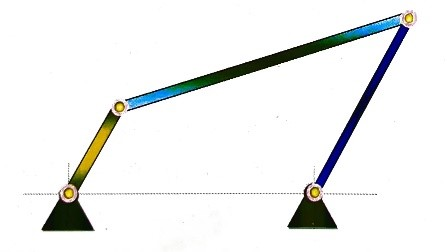
双摇杆机构
曲柄滑块机构
曲柄摇杆机构
双曲柄机构
凸轮的转速决定从动件运动的快慢
凸轮和从动件都有不同的形状
按凸轮形状不同,凸轮机构可以分为盘形凸轮、滚子凸轮和移动凸轮
凸轮机构可以将匀速圆周运动转化为直线往复运动
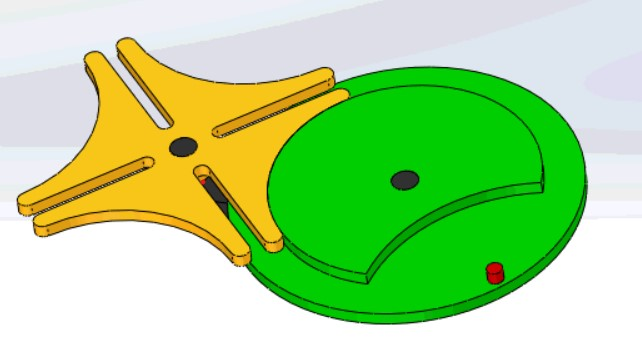
黄色零件
绿色零件
两者都是
两者都不是
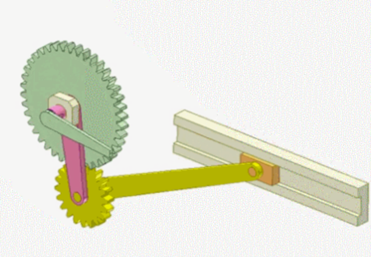
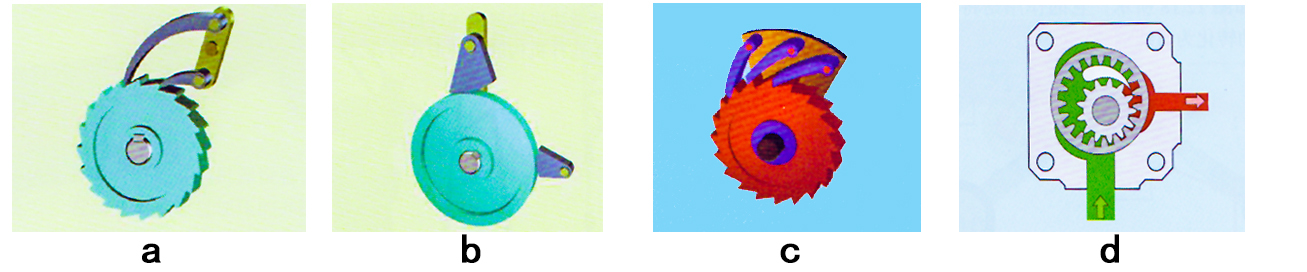
槽轮机构
凸轮机构
棘轮机构
齿轮机构
传动链
齿轮
连杆
滑杆
凸轮,主动件和机架
凸轮,从动件和机架
凸轮,主动件和从动件
主动件,从动件和机架
自行车飞轮
单向腰带扣
千斤顶
撬棍
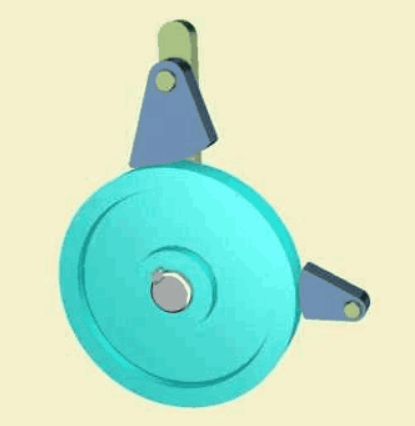
内啮合摩擦式棘轮机构
内啮合齿式棘轮机构
外啮合摩擦式棘轮机构
外啮合齿式棘轮机构
噪声小
能够保护机械
适合远距离传动
可精确地传递动力
美国科幻家艾萨克·阿西莫夫
乔治·德沃尔
意大利作家卡洛·洛伦齐尼
捷克剧作家卡尔·恰佩克
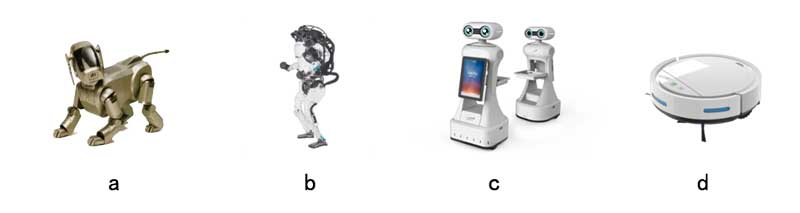
示教再现型机器人
感知型机器人
智能机器人
仿真机器人
a
b
c
d
齿轮传动
链条传动
皮带平行传动
皮带交叉传动
齿轮平行啮合、皮带平行传动
齿轮平行啮合、皮带交叉传动
链传动、皮带平行传动
链传动、皮带交叉传动
摩擦式棘轮机构动程可以无级调节
棘轮机构一定有主动棘爪和止回棘爪两个棘爪
外啮合棘轮机构比内啮合棘轮机构更容易维修安装
齿式棘轮机构动程只能有级调节
链传动
皮带传动
齿轮传动
无法确定
机械能转化为电能
核能转化为化学能
化学能转化为电能
热能转化为电能
沙地上
水泥路上
光滑的木板上
玻璃上
物体体积大小
物体的颜色
物体高度
接触面的粗糙程度
不产生摩擦力
有静摩擦力
有滚动摩擦力
有滑动摩擦力
空气流速变大,压强变小
空气流速变大,压强变大
空气流速变小,压强变大
空气流速变小,压强变小
a
b
c
d
尖顶从动件凸轮机构
滚子从动件凸轮机构
平底从动件凸轮机构
摆动从动件凸轮机构
摆动式从动件棘轮
摩擦式棘轮
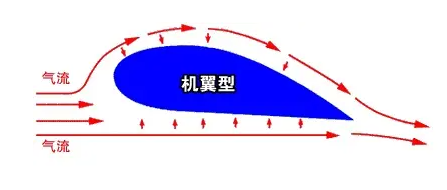
机翼上侧气流速度快
机翼下侧气流速度快
低副接触压强小,耐磨损
设计简单,可以精确实现复杂的运动规律
能准确无误地传递动力
传动力大
齿轮传动
链传动
发表评论 取消回复