指南车
指北针
风向仪
地动仪
可实现远距离传动
可以保护机械
时间有延缓
可以准确无误地传递动力
约瑟夫·英格伯格
乔治·德沃尔
阿西莫夫
森昌弘
水下机器人
服务机器人
军用机器人
工业机器人
机器人是自动控制机器的总称
高仿真机器人是整合了控制论、机械、电子、计算机与人工智能等的产物
机器人必须是人形的
机器人一般由执行机构、驱动装置、检测装置和控制系统和复杂机械等组成
电力驱动
液压驱动
气压驱动
风力驱动
汽车在冰面容易打滑,是因为冰面很光滑
人们在鞋底增加花纹是为了减小摩擦力
摩擦力永远是竖直向下的
静止的物体就会受到静摩擦力
凸轮旋转转速
凸轮大小
凸轮轮廓曲线
凸轮颜色
电动机是为机械提供动力的装置
电机有直流电机和交流电机
电动机应用广泛,如各种机床、电动机械、家用电器等
电动机用于将机械能转化为电能
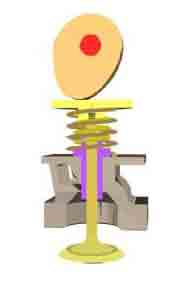
发动机中用到了凸轮机构
凸轮机构的从动件只能做摇摆运动
凸轮机构不属于间歇运动机构
凸轮机构中从动件的动作没有规律
挖掘机中有连杆机构
雨刷器中有连杆机构
连杆机构必须是两个杆构成
骑自行车时大腿和小腿也相当于连杆机构
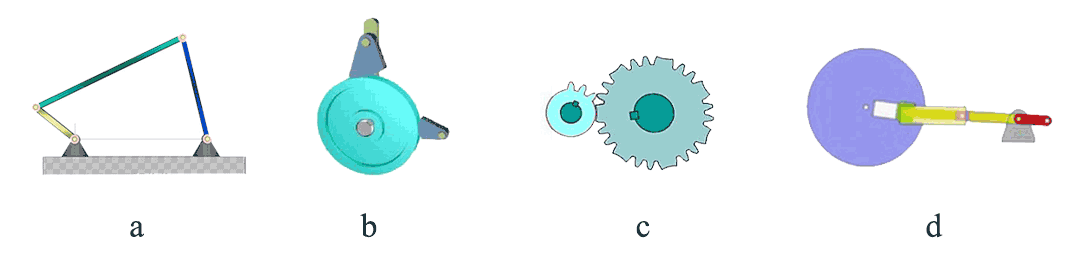
曲柄摇杆
棘轮
轮轴
滑轮
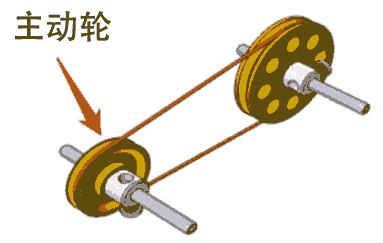
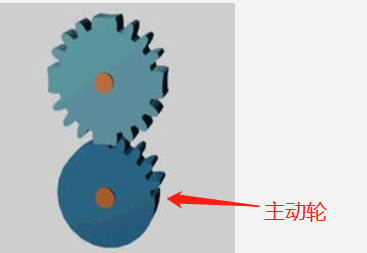
主动轮和从动轮转动方向相反
从动轮的转速大于主动轮的转速
主动轮和从动轮的转动方向相同
皮带传动只有这一种连接方式

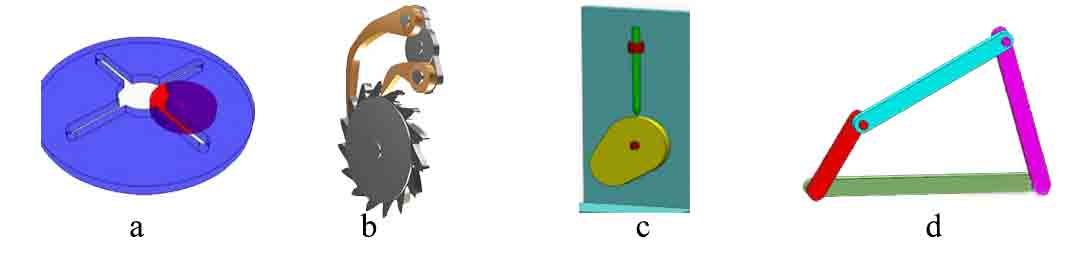
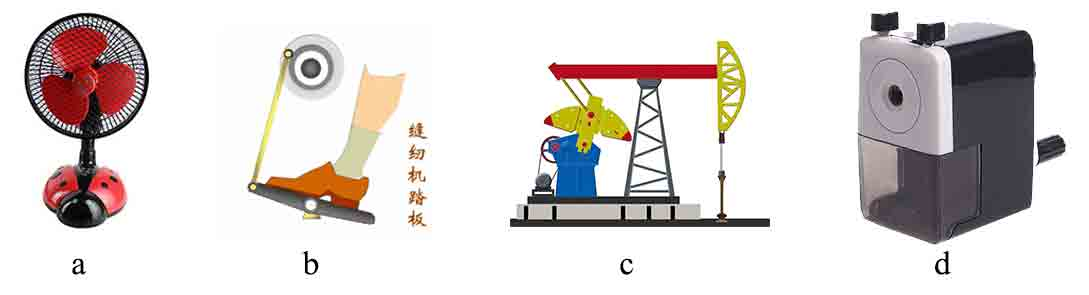
a
b
c
d
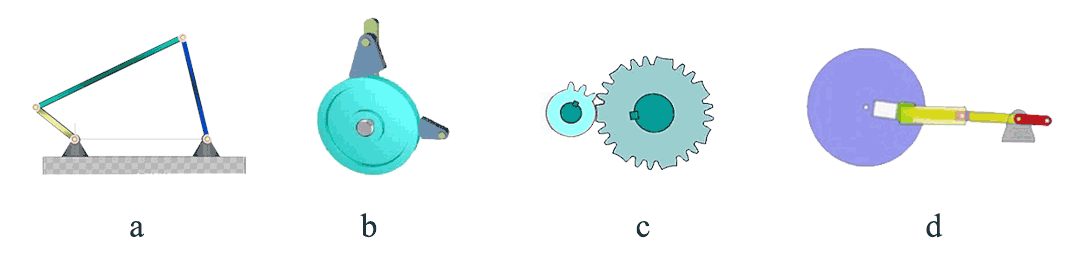
a
b
c
d
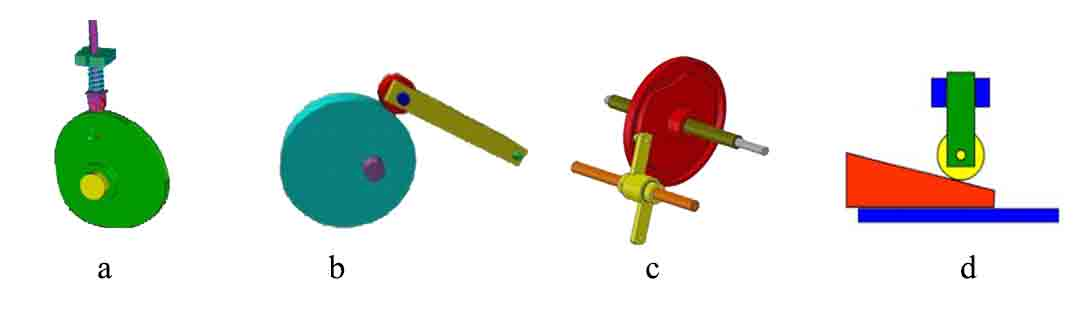
a
b
c
d
a
b
c
d
自行车
门把手
跷跷板
秋千
a
b
c
d
链传动适合远距离传动
链传动中的轮可以不在同一平面内
链传动中轮的旋转方向不同
链传动在突然变速时不容易断裂
a
b
c
d
大齿轮带动小齿轮能实现减速
平行啮合的两个齿轮转动方向相反
小齿轮带动大齿轮能实现加速
齿轮传动适用于远距离的传动

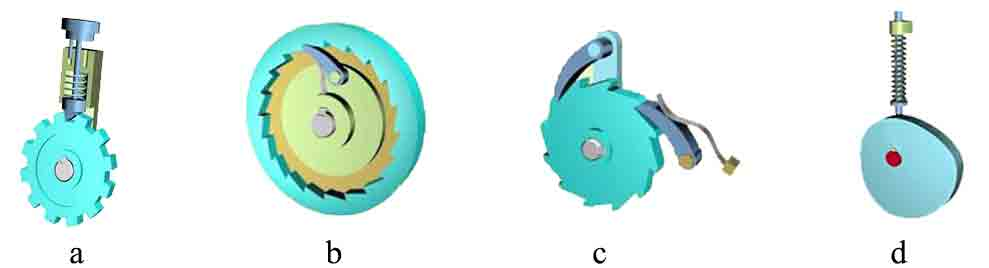
摩擦式棘轮机构
外啮合棘轮机构
内啮合棘轮机构
双动式棘轮机构
a
b
c
d
皮带传动装置
齿轮传动装置
链条传动装置
曲柄连杆装置
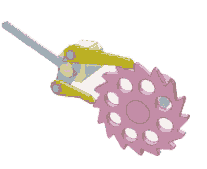
图中棘轮机构属于齿式棘轮机构
图中棘轮机构属于外啮合棘轮机构
图中棘轮机构有两个驱动棘爪,属于双动式棘轮机构
图中棘轮机构中由主动摆杆、棘轮、驱动棘爪和止回棘爪四部分组成
凸轮机构不属于间歇运动机构
凸轮机构按照凸轮的形状可分为盘形凸轮、圆周凸轮和移动凸轮
凸轮机构的从动件只能直线运动
凸轮机构的从动件只能往复摆动
1圈
2圈
3圈
4圈
1s
2s
3s
4s
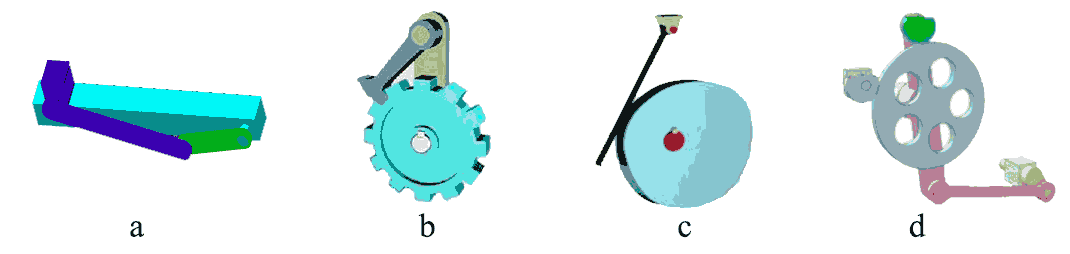
棘轮机构
连杆机构
杠杆结构
轮传动
示教再现型机器人
感知型机器人
槽轮机构
凸轮机构
a
b
凸轮机构可以将圆周运动转化为直线运动
棘轮机构可以连续运动转化为间歇性运动
a
b
尖顶从动件
直动从动件
平行传动
交叉传动

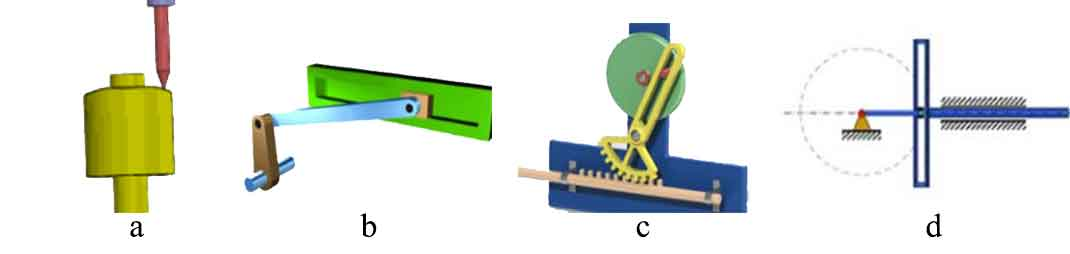
滑轮
轮轴
凸轮机构
槽轮机构
曲柄摇杆机构
反向双曲柄机构
错误
发表评论 取消回复