是俄国的阿西莫夫提出的
最早公布于于美国的官方新闻网站CNN
“在任意情况下听从人类命令”是第一纲领
是一道伦理性纲领
示教型机器人
智能型机器人
智慧型机器人
感知型机器人
木牛流马
机器马车
记里鼓车
载粟木车
会下围棋的智能机器人
会写书法的智能机器人
会跳绳的智能机器人
会用两条腿跑步的智能机器人
英国制造的有跳动心脏的机器人REX
美国生产的BigDog大狗机器人
能像人一样行走的机器人ASIMO
机器人救生员E.M.I.L.Y.
输入设备
输出设备
主控制器
机械手臂
大脑和躯干
心脏和手臂
大脑和心脏
手臂和大脑
0到15
0到9
0到7
0到1
电力驱动
水驱动
液压驱动
气压驱动
摩擦力
支持力
弹力
重力
重力
支持力
摩擦力
以上都是
小明大力推50斤的水桶,水桶没有动
妈妈把50斤的水桶推动了0.3米
爸爸把50斤的小明举过头顶
机器人把100斤的重物抬上3米高的货架
在最低点时,速度最快,能量最大
最高点时能量为0
最低点和最高点的总能量相等
在最低点时动能最小
飞机飞行时机翼的上侧气流速度慢于下侧
飞行时机翼上下侧的压力差为0
气流越快,压力越大
地铁进站时站在黄线外是因为火车带动气流加快,压力变小,人容易被”吸入“铁轨
杠杆两侧受力大小相等
两侧力的作用线到支点的距离乘以力的大小的值相等
天平不是杠杆
杠杆平衡必须两侧的施力点到支点的距离相等
A
B
C
D
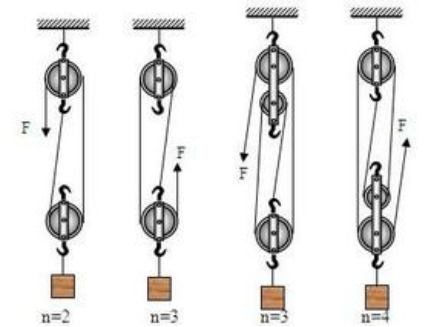
1:100
1:10
100:1
10000:1
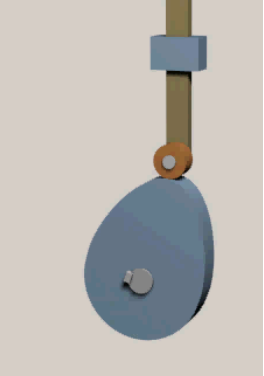
杠杆机构
连杆机构
凸轮机构
棘轮机构
20秒
10秒
2秒
5秒
三角板
高尔夫球杆
螺旋桨
雨刷器
连杆可以做摇摆运动
连杆不能做圆周运动
汽车的转向装置用了连杆机构
行走机器人大多采用连杆机构
机体组
活塞连杆组
曲轴飞轮组
以上都是
由曲柄直接带动活塞转动
由活塞带动连杆转动
由曲柄带动连杆,连杆带动活塞转动
以上都不对
往复活塞式发动机
压缩机主机
冲床主机
以上都是
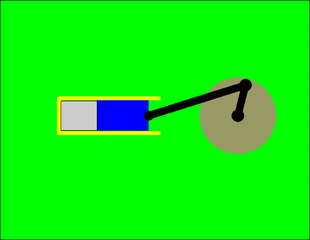
较短的竿和较长的竿
较短的竿和蓝色滑块
较长的竿和较短的竿
蓝色滑块和较短的竿
机械尺蠖
舂米机
秋千
直升机
外啮合棘轮加工和维修方便
内啮合棘轮外形尺寸大
摩擦式棘轮传动平稳、噪音小
棘轮机构的主要作用是间歇送进、制动和超越
电机分为直流电机和交流电机
电机又被称为“马达”
电机将电能转化为机械能
以上都正确
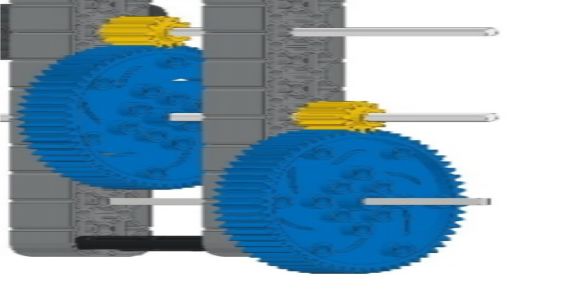
齿轮传动的精密度高于皮带传动
皮带传动的噪音大
链传动中采用的传动链不可拆卸
在稻草人模型中主要采用了链传动
棘轮机构
不完全齿轮机构
凸轮机构
全齿轮机构
清洁卧室
手术缝合
能够适应恶劣的工作环境
能够长时间高强度工作
体积小
处理数据快
变向装置采用了连杆机构
发动机应用了曲柄连杆机构
按外形分为盘形凸轮、移动凸轮、圆柱凸轮
按从动件分为顶尖式、滚子式、平底式、曲底式
圆周运动
摇摆运动


钓鱼杆
机械尺蠖
连杆机构
凸轮机构
连杆机构
杠杆结构
发表评论 取消回复